Looking to expand the device capability I stumbled across a really interesting little project that is still in the early stages of development but, is functional and worth trying out.
The TC²-BBS Meshtastic Version is a simple BBS system that runs on a RaspberryPi, Linux PC or virtual machine (VM) and can connect to a Meshtastic device via either serial, USB or TCP/IP. Having my M0AWS-1 Meshtastic node at home connected to Wifi I decided to use a TCP/IP connection to the device from a Linux VM running the Python based TC²-BBS Meshtastic BBS.
Following the instructions on how to deploy the BBS is pretty straight forward and it was up and running in no time at all. With a little editing of the code I soon had the Python based BBS software M0AWS branded and connected to my Meshtastic node-1.
M0AWS Meshtastic BBS Main Menu accessible on M0AWS-1 node.
The BBS system is very reminiscent of the old packet BBS systems of a bygone era but, it is ideal for the Meshtastic world as the simple menus and user interface are easily transmitted in seconds via the Mesh using minimal bandwidth.
The BBS is accessible by opening a Direct Message session with the M0AWS-1 node. Sending the letter H to the node will get you the initial help screen showing the menu above and then from there onwards it’s just a matter of selecting the menu item and following the BBS prompts to use the BBS.
The BBS also works across MQTT. I tested it with Dave, G4PPN and it worked perfectly via the Meshtastic MQTT server.
This simple but, effective BBS for the Meshtastic network will add a new message store/forward capability to the Mesh and could prove to be very important to the development of the Meshtastic mesh in the UK and the rest of the world.
We’ve recently added a new room to the Matrix HAM Radio Space for Digital Voice modes as this was an area of interest that didn’t really fit into any of the other rooms.
The new Digital Voice room has attracted a lot of attention from members, with a lot of the focus being on the AllStarLink system. Michael, DK1MI built an AllStarLink node in the cloud for us all to use for Matrix Nets and so I decided I had to get in on the fun.
Jumbospot SHARI SA818 Amateur Radio AllStarLink Radio Interface Front Panel ViewJumbospot SHARI SA818 Amateur Radio AllStarLink Radio Interface Rear ViewJumbospot SHARI SA818 Amateur Radio AllStarLink Radio Interface stripped down View
The two USB connectors on the SHARI device are position such that they plug into two of the available 4 USB ports on the RaspberryPi without the need for cables. This keeps the whole solution together in one neat package.
Before you start you will need to obtain a node number and secret (password) from the AllStarLink Portal. To get this you will need to provide proof to the AllStarLink administrators that you are a licensed Amateur Radio (HAM) operator. This is done by uploading a copy of the first page of your HAM licence to the website for the admin team to check. This can take 24hrs to be completed so make sure you get this all done before trying to build your node. You cannot build a node successfully without a node number and secret.
Of course you will also need a transceiver that can operate on the 438.800Mhz frequency or other frequency of your choice on the 2m or 70cm HAM band.
You will also need to open port 4569 on your internet router and setup port forwarding to the IP Address that you will be using on your RaspberryPi node. It’s important to use a static IP Address on your RaspberryPi.
There are quite a few different Linux based operating system (O/S) images that are available for the RaspberryPi devices that have been specifically tailored for the AllStarLink node and include all the necessary software and library packages out the box.
Once downloaded you need to burn the ISO image onto a suitable SD card for your RaspberryPi. I use BalenaEtcher as it’s extremely quick and reliable at burning ISO images to SD cards.
Of course if you are a hardline Linux command line junkie you can always use dd to create the SD card.
Once you’ve got your O/S onto your SD card, slot it into your RaspberryPi making sure your SHARI device is connected to the two USB ports and then power it up. Make sure you have a good PSU for the RaspberryPi as the two devices together draw around 3A of current during the transmit cycle. (I use a 3.6A PSU from Amazon).
The default login for the Raspbian O/S is shown below. Login via SSH and configure your RaspberryPi for your local network. It’s important to use a static IP Address configured either directly on the RaspberryPi or via DHCP in your router.
Next you need to change directory into the asterisk config file directory using the command shown below:
cd /etc/asterisk
In this directory you will find all the default config files that come as part of the distro. For this build we’re not going to use them and so we need to move them out of the way ready for a set of config files that have already been configured correctly.
Using the following commands create a new directory, move into that new directory and then move all the unwanted configuration files into it:
mkdir ORIGINAL-CONF-FILES
cd ./ORIGINAL-CONF-FILES
mv ../*.conf ./
ls -la
cd ../
You should now be back in the /etc/asterisk directory which will now be empty apart from the custom directory which we left in place.
You now need to copy the correctly configured configuration files into the /etc/asterisk directory. Start by downloading the zip file containing the new configuration files
Once downloaded, copy the .zip file into the repeater users home directory (/home/repeater) using either scp on the Linux command line or if using Windows you can use the FileZilla Client in SFTP mode using the login details above.
Once you have the .zip file in the repeater user’s home directory you need to copy the file into the /etc/asterisk directory as user root:
The gpioBASH script and configuration details were supplied by Mark, G1INU in the Digital Voice room on the Matrix. It adds the COS light functionality to the setup. The COS light will now light every time the SA818 hears RF on the input.
The next thing you need to do is configure the SA818 radio device in the SHARI. The script I used was originally from https://wiki.fm-funknetz.de/doku.php?id=fm-funknetz:technik:shari-sa818 all I’ve done is change the entries to switch off CTCSS and changed the frequency to 438.800Mhz. Configuring the SA818 is done by running the SA818-running.pyPython programme that you moved into the repeater user home directory. Making sure you are still user root, run the following commands:
cd /home/repeater
./SA818-running.py
At this point your SHARI SA818 device will be configured to operate on 438.800Mhz and CTCSS will be disabled.
If you want to change the frequency or enable and set a CTCSS tone to access the node you will need to edit the Python programme using your favourite text editor and change the entries accordingly. Once changed rerun the program as shown above and your SHARI will be reconfigured to your new settings.
Next you need to move the allmon.ini.php file into the correct directory so that it enables access to the Allstar Monitor web page on the device so that you can manage connecting/disconnecting nodes. Use the following commands as user root to achieve this:
The allmon.ini.php file needs to have your node name entered into it for it to work correctly. As user root, change directory and edit the file using your favourite editor.
cd /var/www/html
Using your text editor, search for the line starting [XXXXX] and change the XXXXX to your node number. Save the change and exit the file.
At this point you are almost complete, all that is left to do is add your node number and node secret into the appropriate configuration files in the /etc/asterisk directory.
Since I am a Linux command line junkie I use vi to edit all the configuration files on the command line as user root, but you can use any editor of your choice.
cd /etc/asterisk
Start with the extensions.conf file. Search for the line starting with NODE = and delete the XXXXX entry and insert your node number. Save the file and edit it.
Next you need to edit the iax.conf file. This time search for the line starting with register= and change the XXXXX for your node number and the YYYYYYYYYYYY for your node secret. Be careful not to accidentally delete any other characters in the lines otherwise it will corrupt the configuration file.
In the same file search for the two lines that start with secret = and change the YYYYYYYYYYYY for your node secret. Once you have changed both of the secret entries, save and exit the file.
The final file to edit is the rpt.conf file. Once again open the file using your favourite editor and search for the line starting with XXXXX = radio@127.0.0.1:4569/XXXXX, change the XXXXX entries for your node number making sure not to delete any other characters next to the XXXXX entries.
Further down in the same file there is a line that starts with [XXXXX], once again change the XXXXX for your node number making sure to keep the square brackets at each end of the node number as you edit it.
Finally move down to the very bottom of the file and find the two lines that start with /home/repeater/gpio, once again change the XXXXX entries for your node number.
Once this is done, save and exit the file. At this point your node should be fully configured and will only require a reboot to get it working.
As user root, reboot your raspi using the reboot command.
reboot
Once your raspi comes back online, login using SSH as user repeater and then become root user using the sudo command detailed above.
You now need to create the admin user password for the Allstar Monitor web page on the device. This is done using the following commands as user root:
cd /var/www/html/
htpasswd -c .htpasswd admin
You will be asked to enter a password twice for the admin user, make sure you make a note of this password as you will need it to login to the web page.
Once this is done your configuration is complete, logout from the terminal session by entering exit twice (once to logout as user root and another to logout as user repeater).
Using your favourite web browser enter the IP Address of your raspi into the URL bar as shown below:
http://<Your-Raspi-IP>/allmon2
Note: remove the <> from the URL once you have entered the required information.
Once this is done you should be presented with your node control panel as shown below.
First visit to the AllStar Monitor Web Page
Login using Admin and the password you set above and you are now ready to start using your node.
It’s a good idea to connect to node 55553 which is a parrot test node to check your audio levels. you can do this by entering the node into the field at the top left and pressing the connect button.
M0AWS AllStarLink Node 61928 connected to 55553 Parrot
Once connected, tune your radio to 438.800Mhz FM and transmit a test message using your callsign and test123, or something similar. The parrot will then play your recording back to you so that you can hear how you sound. It will also comment on your audio level as to whether it is OK or not.
You are now connected to AllStarLink network and have the world at your finger tips. Below is a small list of nodes in the UK, Australia and America to get you started chatting with other HAMs via your node.
55553 ASL Parrot for testing
41522 M0HOY HUBNet Manchester, UK
60349 VK6CIA 439.275 Perth, Western Australia
51077 VK6SEG South West Hub B Albany WA
2167 M0JKT FreeSTAR UK HUB 2 freestar.network
53573 NWAG NW AllStar Group Lancashire, UK
27339 East Coast Hub Wilmington NC USA
M0AWS AllStarLink Node 61928 sitting on the equipment rack
Thanks to Michael, DK1MI for building and hosting the Matrix HAM Radio Space AllStarLink Node (57881) and getting us all kicked off into the world of AllStarLink!
We hope to be having regular Matrix Net’s on the node soon for all Matrix members and visitors. We’ll organise days/times via the Digital Voice room.
Following on from my article about my QO-100 Satellite Ground Station Complete Build, this article goes into some detail on the Node-RED section of the build and how I put together my QO-100 Satellite Ground Station Dashboard web app.
The Node-RED project has grown organically as I used the QO-100 satellite over time. Initially this started out as a simple project to synchronise the transmit and receive VFO’s so that the SDR receiver always tracked the IC-705 transmitter.
Over time I added more and more functionality until the QO-100 Ground Station Dashboard became the beast it is today.
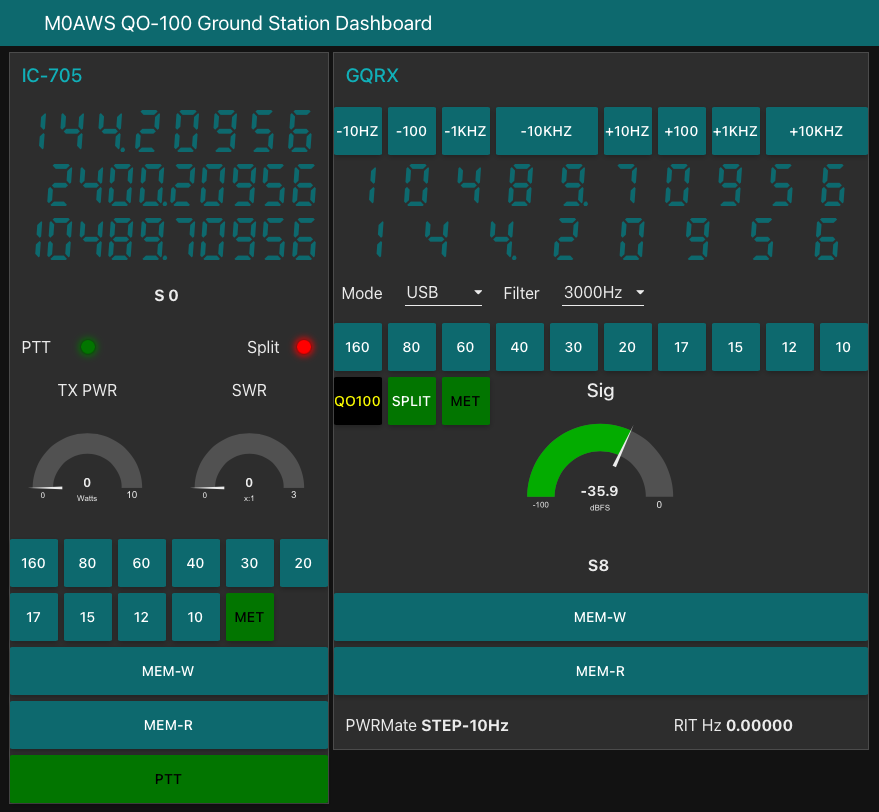
M0AWS QO-100 Ground Station Control Dashboard built using Node-RED.
Looking at the dashboard web app it looks relatively simple in that it reflects a lot of the functionality that the two radio devices already have in their own rights however, bringing this together is actually more complicated than it first appears.
Starting at the beginning I use FLRig to connect to the IC-705. The connection can be via USB or LAN/Wifi, it makes no difference. Node-RED gains CAT control of the IC-705 via XMLRPC on port 12345 to FLRig.
To control the SDR receiver I use GQRX SDR software and connect to it using RIGCTL on GQRX port 7356 from Node-RED. These two methods of connectivity work well and enables full control of the two radios.
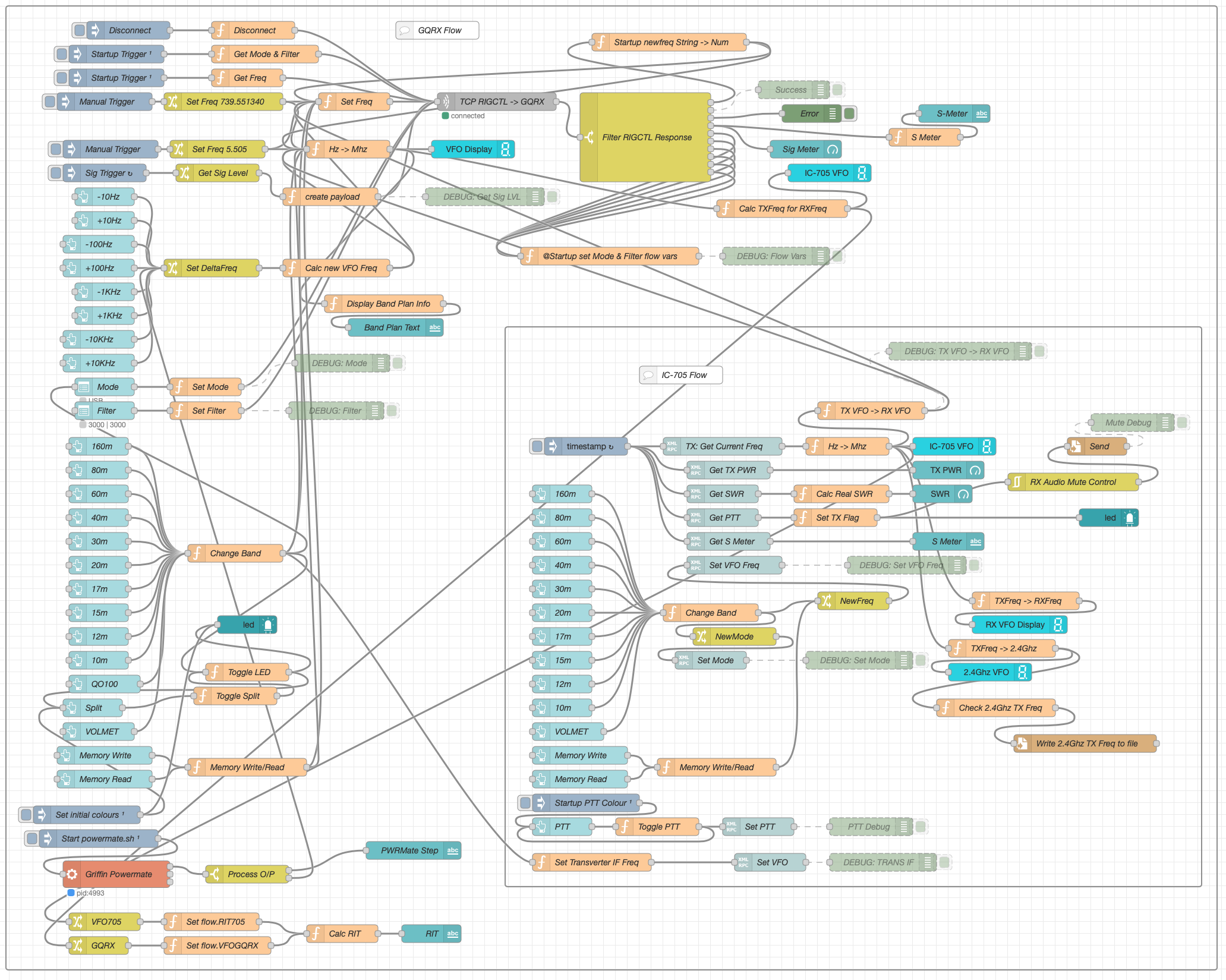
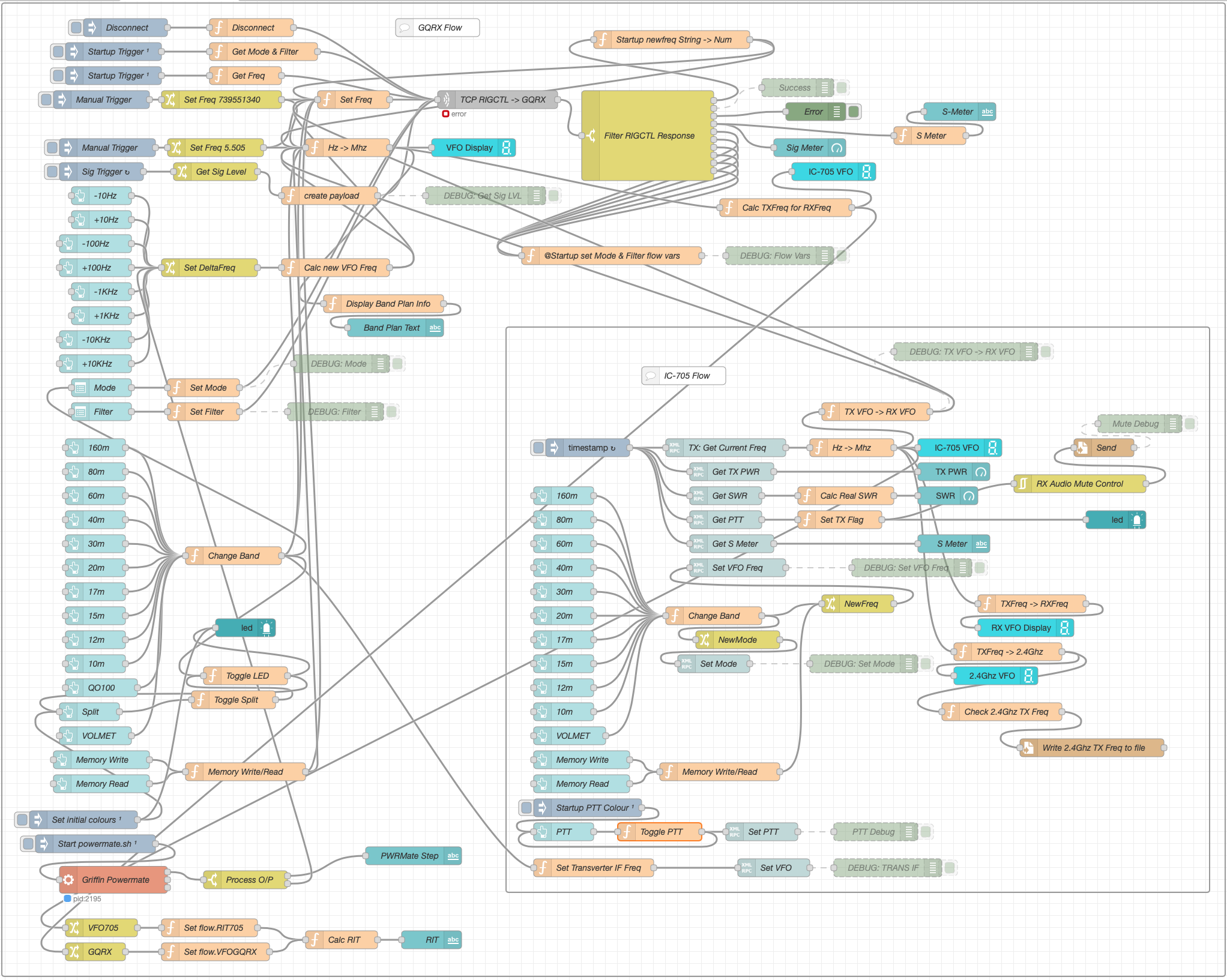
M0AWS Node-RED QO-100 Ground Station Dashboard Flow as of 12/06/24
The complete flow above looks rather daunting initially however, breaking it down into its constituent parts makes it much easier to understand.
There are two sections to the flow, the GQRX control which is the more complex of the two flows and the comparatively simple IC-705 section of the flow. These two flows could be broken down further into smaller flows and spread across multiple projects using inter-flow links however, I found it much easier from a debug point of view to have the entire flow in one Node-RED project.
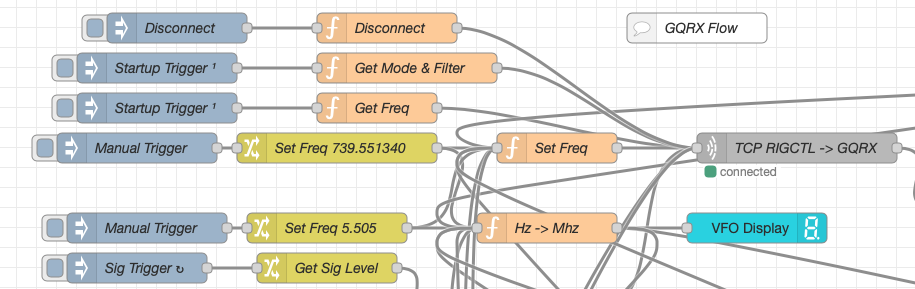
Breaking down the flow further the GQRX startup section (shown below) establishes communication with the GQRX SDR software via TCP/IP and gets the initial mode and filter settings from the SDR software. This information is then used to populate the dashboard web app.
M0AWS Node-RED QO-100 Ground Station Dashboard – GQRX Startup Flow
The startup triggers fire just once at initial startup of Node-RED so it’s important that the SDR device is plugged into the PC at boot time.
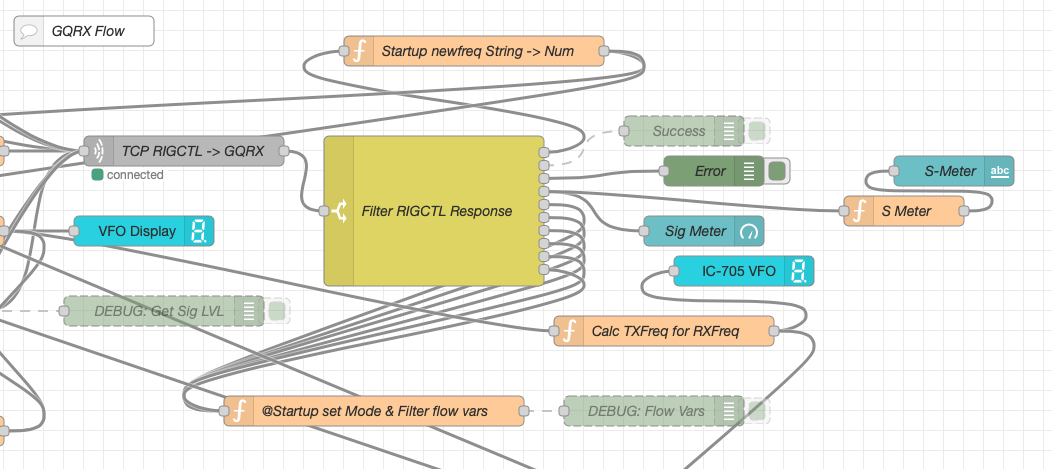
All the startup triggers feed information into the RIGCTL section of the GQRX flow. This section of the flow (shown below) passes all the commands onto the GQRX SDR software to control the SDR receiver.
M0AWS Node-RED QO-100 Ground Station Dashboard – GQRX RIGCTL Flow
The TCP RIGCTL -> GQRX node is a standard TCP Request node that is configured to talk to the GQRX software on the defined IP Address and Port as configured in the GQRX setup. The output from this node then goes into the Filter RIGCTL Response node that processes the corresponding reply from GQRX for each message sent to it. Errors are trapped in the green Debug node and can be used for debugging.
The receive S Meter is also driven from the the output of the Filter RIGCTL Response node and passed onto the S Meter function for formatting before being passed through to the actual gauge on the dashboard.
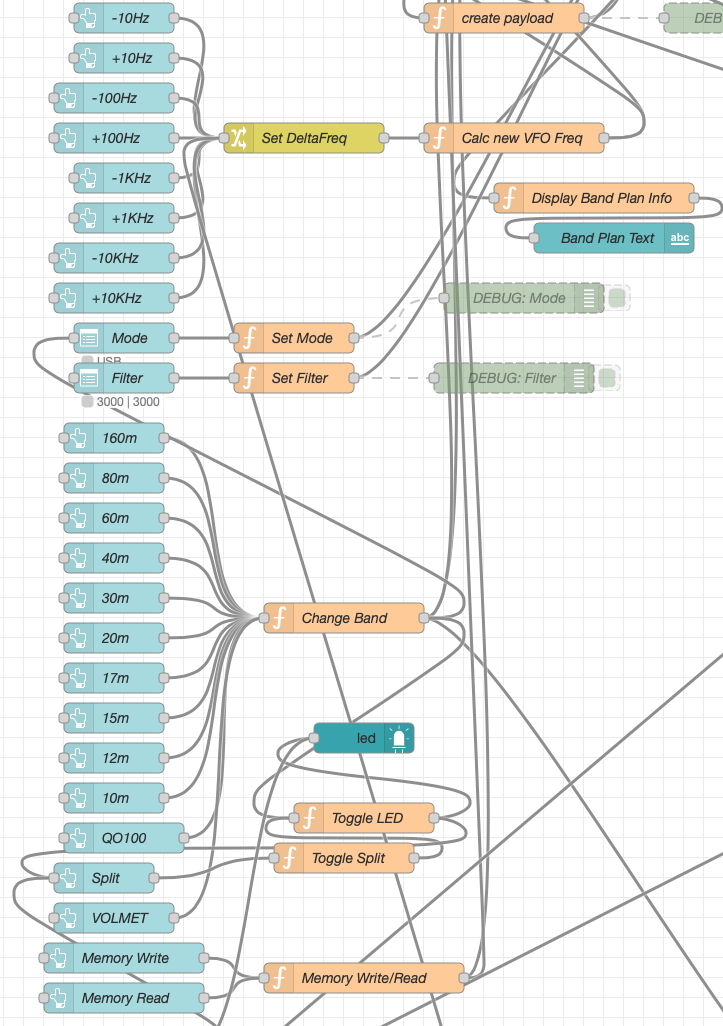
Continuing down the left hand side of the flow we move into the section where all the GQRX controls are defined.
M0AWS Node-RED QO-100 Ground Station Dashboard – GQRX Controls Flow
In this section we have the VFO step buttons that move the VFO up/down in steps of 10Hz to 10Khz. Each button press generates a value that is passed onto the Set DeltaFreq change node and then on to the Calc new VFO Freq function. From here the new VFO frequency is stored and passed onto the communications channel to send the new VFO frequency to the GQRX software.
The Mode and Filter nodes are simple drop down menus with predefined values that are used to change the mode and receive filter width of the SDR receiver.
Below are the HAM band selector buttons, each of these will use a similar process as detailed above to change the VFO frequency to a preset value on each of the HAM HF Bands.
The QO-100 button puts the transmit and receive VFO’s into synchro-mode so that the receive VFO follows the transmit VFO. It also sets the correct frequency in the 739Mhz band for the downlink from the LNB in GQRX SDR software and sets the IC-705 to the correct frequency in the 2m VHF HAM band to drive the 2.4Ghz up-converter.
The Split button allows the receive VFO to be moved away from the transmit VFO for split operation when in QO-100 mode. This allows for the receive VFO to be moved away so that you can RIT into slightly off frequency stations or to work split when working DXpedition stations.
The bottom two Memory buttons allow you to store the current receive frequency into a memory for later recall.
At the top right of this section of the flow there is a Display Band Plan Info function, this displays the band plan information for the QO-100 satellite in a small display field on the Dashboard as you tune across the transponder. Currently it only displays information for the satellite, at some point in the future I will add the necessary code to display band plan information for the HF bands too.
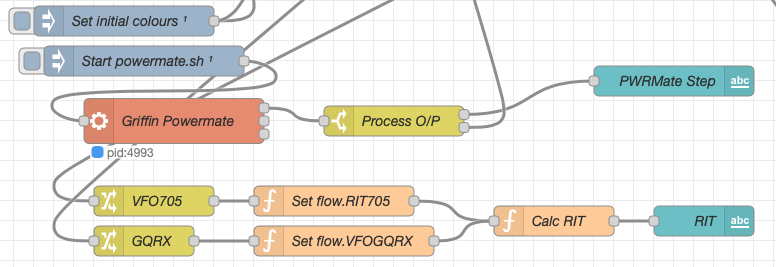
The final section of the GQRX flow (shown below) sets the initial button colours and starts the Powermate USB VFO knob flow. I’ve already written a detailed article on how this works here but, for completeness it is triggered a few seconds after startup (to allow the USB device to be found) and then starts the BASH script that is used to communicate with the USB device. The output of this is processed and passed back into the VFO control part of the flow so that the receive VFO can be manually altered when in split mode or in non-QO-100 mode.
M0AWS Node-RED QO-100 Ground Station Dashboard – Powermate VFO Flow
The bottom flows in the image above set some flow variables that are used throughout the flow and then calculates and sets the RIT value on the dashboard display.
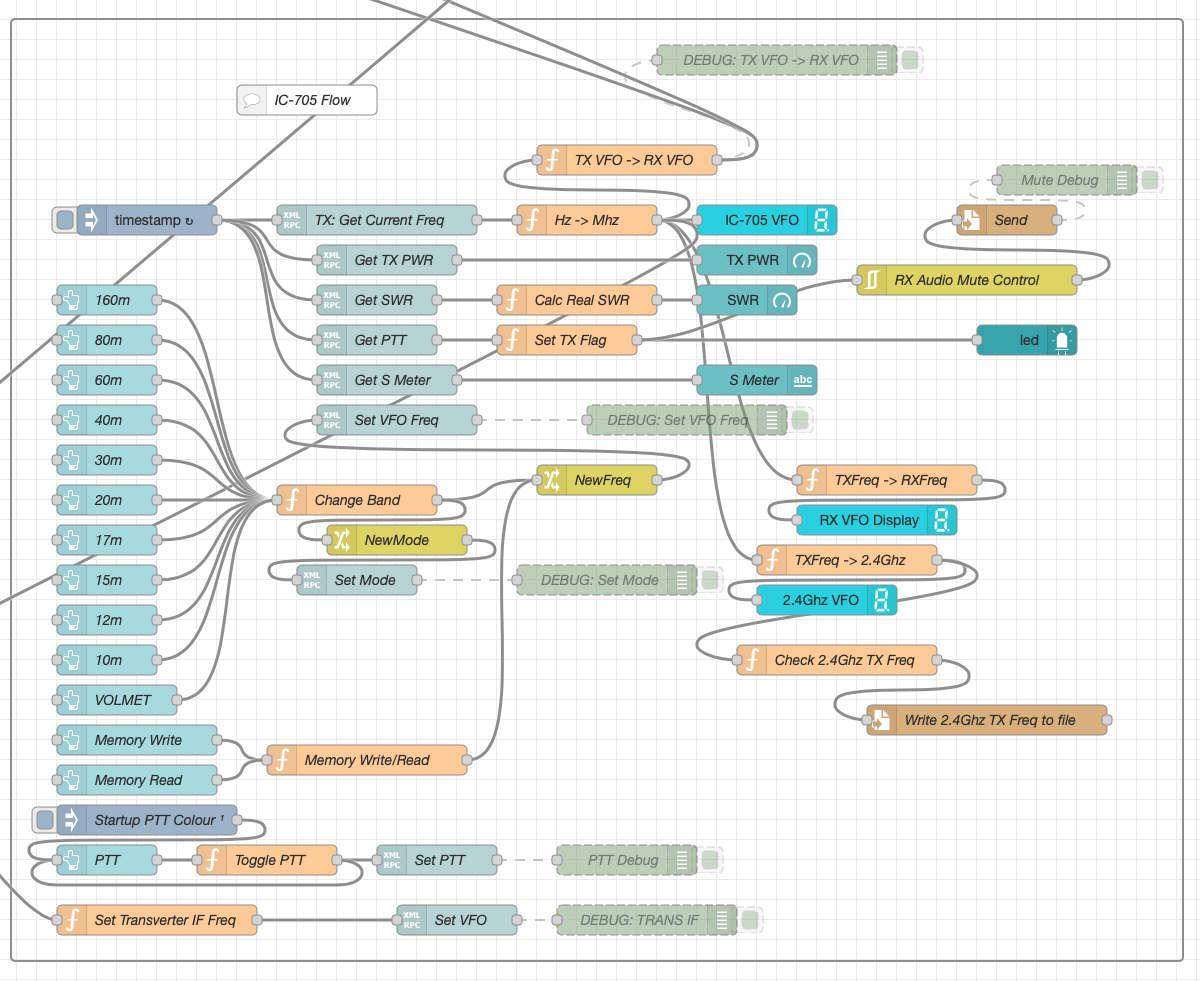
The final section of the flow is the IC-705 control flow. This is a relatively simple flow that is used to both send and receive data to/from the IC-705, process it and pass it on to the other parts of the flow as required.
M0AWS Node-RED QO-100 Ground Station Dashboard – IC-705 Control Flow
The IC-705 flow is started via the timestamp trigger at the top left. This node is nothing more than a trigger that fires every 0.5 seconds so that the dashboard display is updated in near realtime. The flow is pretty self explanatory, in that it collects the current frequency, transmit power, SWR reading, PTT on/off status and S Meter reading each time it is triggered. This information is then processed and used to keep the dashboard display up to date and to provide VFO tracking information to the GQRX receive flow.
On the left are the buttons to change band on the IC-705 along with a button to tune to the VOLEMT on the 60m band. Once again there two memory buttons to save and recall the IC-705 VFO frequency.
The Startup PTT Colour trigger node sets the PTT button to green on startup. The PTT button changes to red during transmit and is controlled via the Toggle PTT function.
At the very bottom of the flow is the set transverter IF Freq function, this sets the IC-705 to a preselected frequency in the 2m HAM band when the dashboard is switched into QO-100 mode by pressing the QO-100 button.
On the right of the flow there is a standard file write node that writes the 2.4Ghz QO-100 uplink frequency each time it changes into a file that is used by my own logging software to add the uplink frequency into my log entries automatically. (Yes I wrote my own logging software!)
The RX Audio Mute Control filter node is used to reduce the receive volume during transmit when in QO-100 full duplex mode otherwise, the operator can get tongue tied hearing their own voice 250ms after they’ve spoken coming back from the satellite. This uses the pulse audio system found on the Linux platform. The audio is reduced to a level whereby it makes it much easier to talk but, you can still hear enough of your audio to ensure that you have a good, clean signal on the satellite.
As I said at the beginning of this article, this flow has grown organically over the last 12 months and has been a fun project to put together. I’ve had many people ask me how I have created the dashboard and whether they could do the same for their ground station. The simple answer is yes, you can use this flow with any kind of radio as long as it has the ability to be controlled via CAT/USB or TCP/IP using XMLRPC or RIGCTL.
To this end I include below an export of the complete flow that can be imported into your own Node-RED flow editor. You may need to make changes to it for it to work with your radio/SDR but, it shouldn’t take too much to complete. If like me you are using an IC-705 and any kind of SDR controlled by GQRX SDR software then it’s ready to go without any changes at all.
I get quite a few emails from readers of my blog asking how my QO-100 satellite station is put together and so, I thought perhaps now is a good time to put together an article detailing the complete build.
My QO-100 satellite ground station is built around my little Icom IC-705 QRP transceiver, it’s a great little rig and is ideal for the purpose of driving a 2.4Ghz transverter/up-converter.
Of course all the software used for the project is Opensource and freely available on the internet.
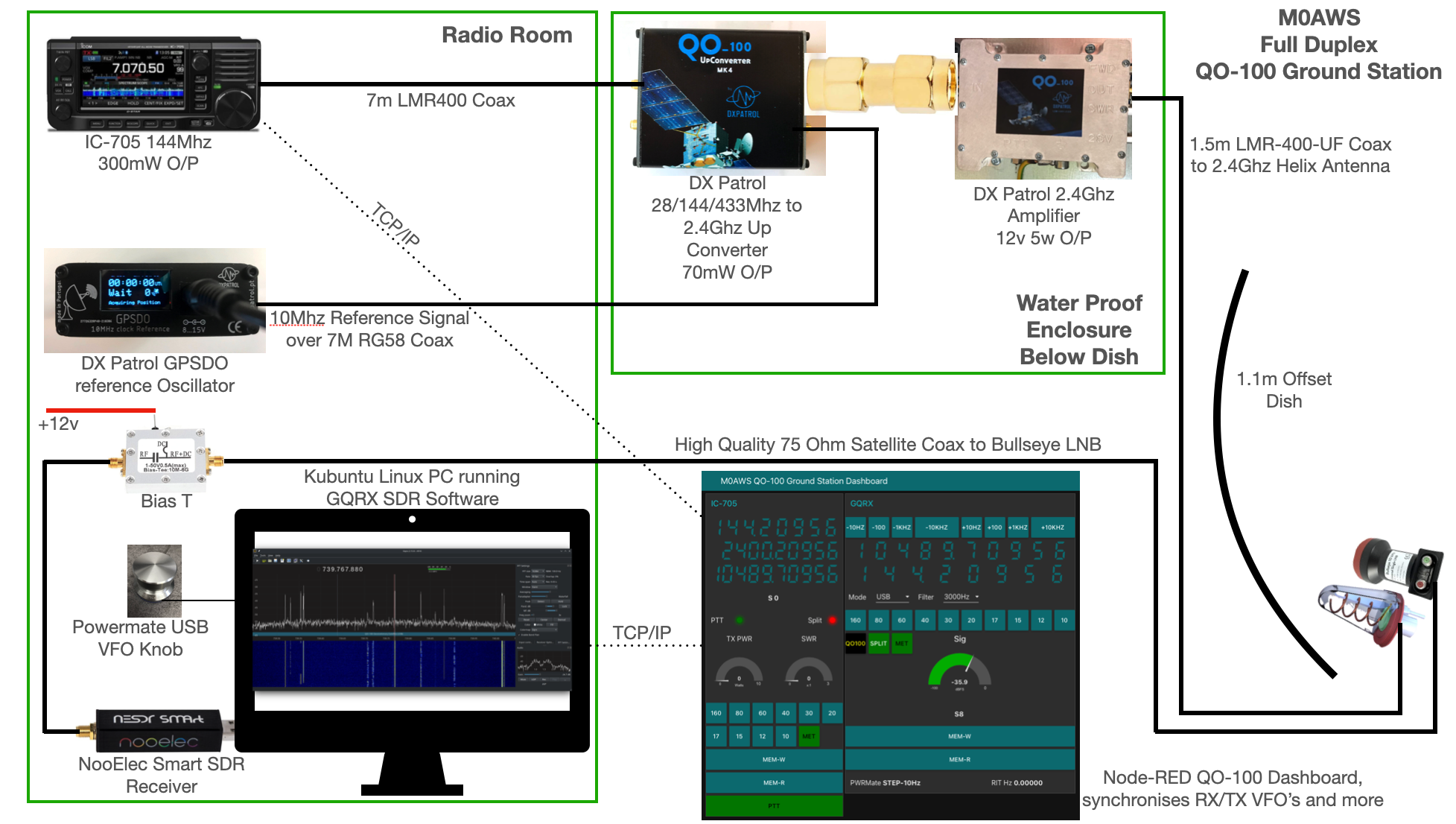
M0AWS QO-100 Ground Station Build Visual (Click to Enlarge)
The station comprises of the following building blocks:
QO-100 Ground Station Dashboard developed using Node-RED
LMR400-UF/RG58 Coax Cable
M0AWS QO-100 1.1m (110cm) off-set Dish with IceCone Helix antenna and Bullseye LNB.
To get a good clear view of the QO-100 satellite I have the dish mount 3.2m above the ground. This keeps it well clear of anyone walking past in the garden and beams the signal up at an angle of 26.2 degrees keeping well clear of neighbouring gardens.
The waterproof enclosure below the dish houses all the 2.4Ghz equipment so that the distance between the feed point and the amplifier are kept to a minimum.
The DXPatrol amplifier is spec’d to run at 28v/12w or 12v/5w, I found that running it at 28v produced too much output for the satellite and would cause the LEILA alarm on the satellite to trip constantly. Running the amp at 12v with a maximum of 5w output (average 2.5-3.5w) is more than enough for me to have a 5/9+10 signal on the transponder.
The large 1.1m dish gives me quite an advantage on receive enabling me to hear the very weak stations with ease compared to other stations.
2.4Ghz ground station enclosure ready for testing
The photo above shows the 2.4Ghz equipment mounted in the waterproof enclosure below the dish. This photo was taken during the initial build phase before I rewired it so, the amplifier is shown connected to the 28v feed. To rewire the amp to 12v was just a matter of removing the 28v converter and connecting the amp directly to the 12v feed instead. This reduced the output from a maximum of 12w down to a maximum of 5w giving a much better (considerate) level on the satellite.
It’s important to keep all interconnects as short as possible as at 2.4Ghz it is very easy to build up a lot of loss between devices.
For the connection from the IC-705 to the 2.4Ghz Up-Converter I used a 7m run of LMR-400 coax cable. The IC-705 is set to put out just 300mW on 144Mhz up to the 2.4Ghz converter and so it’s important to use a good quality coax cable.
Once again the output from the 2.4Ghz amplifier uses 1.5m of LMR-400-UF coax cable to feed up to the 2.2 turn Icecone Helix Antenna mounted on the dish. This keeps loss to a minimum and is well worth the investment.
Bullseye 10Khz High Stability Unversal Single LNB for 10.489-12.750Ghz
The receive path starts with a Bullseye LNB, this is a high gain LNB that is probably one of the best you could use for QO-100 operations. It’s fairly stable frequency wise but, does drift a little in the summer months with the high temperature changes but, overall it really is a very good LNB.
The 12v feed to the LNB is via the coax and is injected by the Bias-T device that is in the radio shack. This 12v feed powers the LNA and associated electronics in the LNB to provide a gain of 50-60dB.
Bias-T to inject 12v feed into the coax for the Bullseye LNB
From the Bias-T the coax comes down to the NooElec SmartSDR receiver. This is a really cheap SDR device (<£35 on Amazon) based on the RTL-SDR device but, it works incredibly well. I originally used a Funcube Dongle Pro+ for the receive side however, it really didn’t handle large signals very well and there was a lot of signal ghosting so, I swapped it out for the NooElec SDR and haven’t looked back since.
The NooElec SmartSDR is controlled via the excellent Opensource software GQRX SDR. I’ve been using GQRX SDR for some years now and it’s proven itself to be extremely stable and reliable with support for a good number of SDR devices.
To enhance the operation of the SDR device I have added a Griffin Powermate VFO knob to the build. This is an old USB device that I originally purchased to control my Flex3000 transceiver but, since I sold that many moons ago I decided to use it as a VFO knob in my QO-100 ground station. Details on how I got it working with the station are detailed in this blog article.
Having the need for full duplex operation on the satellite this complicates things when it comes to VFO tracking and general control of the two radios involved in the solution and so I set about creating a QO-100 Dashboard using the great Node-RED graphical programming environment to create a web app that simplifies the management of the entire setup.
M0AWS QO-100 ground Station Control Dashboard built using Node-RED.
The QO-100 Dashboard synchronises the transmit and receive VFO’s, enables split operation so that you can transmit and receive on different frequencies at the same time and a whole host of other things using very little code. Most of the functionality is created using standard Node-RED nodes. More info on Node-RED can be found on the Opensource.radio Wiki or from the menu’s above.
I’ll be publishing an article all about the QO-100 Dashboard in the very near future along with a downloadable flow file.
I’m extremely pleased with how well the ground station works and have had well in excess of 500 QSO’s on the QO-100 satellite over the last last year.
Update July 1, 2024. LoTW is back up! It is running slow, but it is available. Thank goodness.
--
When I wrote the article back in May, I hardly thought that LoTW would be down a month later.
Sadly, the outage continues.
My suspicions were correct, however, that this was something more than a simple networking problem. The ARRL has since admitted their network was viciously and uniquely hacked. I can certainly understand their caution to make sure that every system linked to LoTW is given a clean bill of health before turning the system back on.
Earlier this week, on Tuesday there was apparently a brief period of time when LoTW was accessible. A couple of my ham buddies managed to upload some contacts. They'll have to wait for confirmations when the rest of us can get in.
I do hope it is soon. I'm really missing this service.
Just over three years ago, I figured out how to Remotely operate FT8 using a product called RealVNC.
RealVNC had a Home plan that allowed up to 3 users and up to 5 devices for non-commercial use. Perfect for remotely controlled computers in a ham radio shack.
Today, without any notice, RealVNC disabled my Home plan, and I had to choose between paying each month for a plan, or adopting their Lite plan, which allows 1 user and up to 3 devices for non-commercial use.
That's fine. They allow me to use their secure remote access software without fees. I can understand they might want to change the terms.
The Lite plan fits my usage. I've only ever had two devices active anyway, and it's just me as the user.
But, without notice - that is just damned inconvenient. Since I switched plans, I need to visit each device and re-configure them to be part of the new plan. Which means I can't remote into those computers until that is completed.
I wanted to get a programmer for the ID51. So, off to RT Systems as I have some of their programmers already. Got the Mac version of the package for the ID51 but it does not allow programming via SD card. That caught me out because their package for the FT2D does and I wrongly assumed this would too.
Of course, it needs a cable! Off to eBay… an allegedly suitable cable arrived today but the RT Systems program will not find it. Typical, it needs one of their enfangled cables that are incompatible with the rest of the world. No way that will arrive in time for our trip.
So… Chirp then. Downloaded the Mac version but it, too will not see the eBay cable. I know the Mac sees it so why won’t the software? RT Systems has no option to select a USB port, Chirp does but offers no help as to what it is.
Try Linux? Hmmm… I’m really not into fiddling with flatpack or any other enfangled package managers – apt is enough, no apt, no use.
Windows then! Got Chirp, and it can find the cable, and Chirp will see it and will download from the ID51. All good then? Nope!
This exercise was to enable me to program up all the foreign repeaters ready for the trip and also to figure out why our local repeater was in the list incorrectly. So let’s take a step backwards now…
I had tried to update the list of repeaters by downloading from Icom. This method works fine by loading the relevant file onto an SD card and telling the radio to load it. RT Systems take note – why does your FT2D software allow this but the ID51 software does not? This should be standard!
But the resultant list was missing the local repeater. I tried to add it but then the radio tells me there are no repeaters at all. I tried downloading the file from repeaterbook which at least knows about the local repeater. No joy. I tried editing the files already on the radio but each time it somehow messed up. After many attempts and permutations I had to give up which is why I though getting an actual programmer would help.
Enter Chirp (on Windows, yuk…). It downloaded from the radio fine but when I looked at the repeater list it seemed broken – all it had was a list of callsigns and no other information. Ugh! But then I remembered that the radio had whinged that there were no repeaters. So, I loaded a known good repeater list file already omitted the SD card, checked the radio would see repeaters when DR is pressed, and downloaded that from the radio into Chirp. The repeater list is just as broken.
Ok… so I exported everything from Chirp as CSV and opened in LibreOffice. But it does not export the repeater list so I am no further towards understanding how the data works. Time to hit the ‘net. Meanwhile, I checked the current repeater list to see if the ‘Near Repeater’ option was working… nope… 20 minutes in and the radio still has not got a GPS location, just like the FT2D!
Fiddling further with Chirp I found someone had kindly created a list of repeaters that does include our local one. I downloaded this and tried to load it into Chirp but it just says the file format is invalid. I copied it to the SD card and tried to import it into the ID51 – data error. Ok, this has gone far enough, this is not rocket science but it seems that it is made so.
Let’s try Icom’s own software, apparently called cs-51plus2. This is called cloning software and, of course is for Windows. After installing the software it read the ID51 ok. I found the repeater list under ‘Digital’ and, indeed, the local repeater is missing. The big question is, can I add it? Ok, I added the local repeater to the end of the list of repeaters, adding the frequency and offset, plus coordinates. Coordinates are degrees, minutes and seconds but I had digital so had to convert – not a biggie. Wrote the data back to the radio and rebooted. And… the repeater is there! And it keys! Just had to wait for the radio to find the GPS – I reckon it does this by carrier pigeon – but finally the ‘Near Repeater’ function works and also finds the newly-added local repeater. Now to add the foreign ones…
So what is the takeaway from all of this? I wasted money on RT Systems software by assuming it would work the same as the FT2D software i.e. use the SD card. Never mind. I tried Chirp but that just confused the issue. And the manufacturer’s own software, generally looked down on, worked fine! (Apparently the software comes with the radio, I don’t remember it having a CD and there is no sign of it but I downloaded it from Icom just fine). I must remind myself if I ever get another radio to first try the manufacturer’s software as my needs are generally lightweight, otherwise try Chirp, and last get the RT Systems software after making sure (by which I mean email them as it is very muddled reading the literature) whether it needs their special cable – and, personally, if it does then I won’t buy the software. I mean, come on, I pay for the software and I am forced to buy a lead I’ll probably only use once or twice?
May 16th, there was an issue with Logbook of The World (LoTW). I could not load the main page at all -- receiving an error indicating the server wasn't responding.
That's pretty normal stuff, actually. There are dozens of problems that can result in this kind of error, so I wasn't surprised. I figured the ARRL staff would address it quickly. But, after much of the day, I was still getting the error.
So, I sent a message to lotw-help@arrl.org, informing them that the web site wasn't responding, kindly asking when they expected it to be back up. I mentioned I was surprised there was no notice of the outage on the ARRL.org web site.
Later that day, the ARRL put up a notice that there was a service disruption involving access to the network, and that it affected LoTW and the ARRL Learning Center. They even updated it the next day, addressing concerns users had over information privacy.
But then, nothing happened. Not until May 22nd, when they updated the notice without really adding any information.
Now, part of this delay may be due to the fact that much of the ARRL staff were all out at the Xenia Hamvention. But, that was a week ago.
What gives? Sure, networking problems. Honestly, though, as a computer professional, networking problems generally don't take more than a week to solve. I'm beginning to suspect there's something more than the ARRL hasn't told us, but I can't be sure.
I'm really missing access to LoTW. In the last 20 years, it has really become central in my enjoyment of the hobby. I do hope I'm wrong, and that ARRL manages to fix this problem soon.
This solution has worked incredibly well from the outset and over time I’ve added extra functionality that I’ve found to be useful to enhance the overall setup.
The latest addition to the ground station solution is a Sennheiser Headset that I picked up for just £56 on Amazon (Much cheaper than the Heil equivalents at the HAM stores!) and have found it to be excellent. The audio quality from both the mic and the headphones is extremely good whilst being light and comfortable to wear for extended periods.
M0AWS – Sennheiser SC 165 Headset
To incorporate this into the ground station the headset is connected to my Kubuntu PC and the audio chain to the IC-705 is sent wirelessly using the latest version of WFView. This works extremely well. The receive audio comes directly from the GQRX SDR software to the headphones so that I have a full duplex headset combination.
Audio routing is done via pulse audio on the Kubuntu PC and is very easy to setup.
Since I no longer have a mic connected to the IC-705 directly I found that I needed a way to operate the PTT wirelessly and this is where the latest addition to my NodeRed QO-100 Dashboard comes in.
Adding a little functionality to the NodeRed flow I was able to create a button that toggles the IC-705 PTT state on and off giving me the ability to easily switch between receive and transmit using a simple XMLRPC node without the need for a physical PTT button.
M0AWS – Additional NodeRed PTT Flow
The PTT state and PTT button colour change is handled by the Toggle PTT function node shown in the above flow. The code to do this is relatively simple as shown below.
M0AWS – NodeRed Toggle PTT Function to change button colour
The entire QO-100 Dashboard flow has grown somewhat from it’s initial conception but, it provides all the functionality that I require to operate a full duplex station on the QO-100 satellite.
M0AWS – NodeRed QO-100 Dashboard complete flow
This simple but, effective PTT solution works great and leaves me hands free whilst talking on the satellite or the HF bands when using the IC-705. This also means that when using my IC-705 it only requires the coax to be connected, everything else is done via Wifi keeping things nice and tidy in the radio shack.
M0AWS – Updated NodeRed QO-100 Dashboard with PTT button
The image above shows the QO-100 ground station in receive cycle with the RX/TX VFO’s in split mode as the DX station was slightly off frequency to me. The PTT button goes red when in TX mode just like the split button shown above for visual reference.
As you can probably tell, I’m a huge fan of NodeRed and have put together quite a few projects using it, including my HF Bands Live Monitoring web page.
This tutorial explains how to modify Retevis Ailunce HD2's band for different IARU regions and outlines the advantages of DMR in ham radio, including text messaging.
The Retevis Ailunce HD2 is finally here! Here’s a short preview of the highlights. A few weeks before this post was published, Retevis reached out [...]
In 1984, I was working at Hayes Microcomputer Products. They were the premiere modem manufacturer for small computers, back in the days when modems over telephone lines were a primary means of computer to computer and user to computer communications.
In my job, I created communications software to talk to the modems. The software dialed the modem, established connection, provided terminal emulation (my specialty), allowed for the capture of the data stream to files, printing, file transfer with the remote computer (using protocols like XMODEM and YMODEM), and other features.
These were the early days of personal computing. IBM introduced the PC in 1981, and it had rapidly evolved into a defacto standard computer, shoving out various CP/M designs from the previous decade. Personal computers were so new, people were trying to figure out what to do with them. Word processing, spreadsheets and other office applications had just been introduced.
Hayes was trying to stay at the forefront. We had a laboratory filled with pretty much one of every personal computer, and when new ones came out, we would buy one. In late 1983, we got an Apple Lisa. It was a very different kind of computing experience. It was a curiosity to us, and as there was no programming environment available, we didn't see how we could build software to talk to a modem. Plus, at the price point, there were few buyers.
The Macintosh
Though the Macintosh was introduced in January of 1984, I didn't get hands on one until the late spring of 1984. Yes, we brought one into the lab, and it immediately garnered a lot of attention.
While there were similarities to the Apple Lisa, the small screen with square pixels just seemed sharper and more distinct. The whole interface was friendly and approachable. We messed with MacWrite, MacPaint, and MacDraw. We printed on an ImageWriter, making appreciably decent images unlike anything we could do on another type of computer. There were several of us hooked and enthusiastic.
It's hard to describe those days. At this point, everyone has had decades to become familiar with computers that use a graphical user interface and a mouse or other pointing device to interact. Back then, it was a revelation. It was much more approachable than the command-line interfaces of the day.
As I described it to someone in the early 90s -- other computer interfaces required one to reach toward the computer. You had to learn the special language and commands of that computer. The Macintosh was the first computer that reached back toward you -- the user.
The Machine
The Macintosh was based on a 16-bit Motorola MC68000 processor, running at 8 MHz. This was more than competitive with the Intel-based IBM clones circulating at the time. This processor was a great choices by Apple. It had many registers and powerful instructions for manipulating the bit-mapped screen.
Biggest constraint was memory. The 128 KB in the Macintosh was shared with 24 KB used for the screen, several more KB for operating system usage, leaving about 90 KB to run your program. Most of the critical operating system routines were in the Macintosh ROMs, which saved space. Building a program of any sophistication was difficult -- It was very tight to work with.
The single 400 KB floppy disk drive was also a limitation. Trying to save a file to another diskette could produce an endless amount of swapping. It was the lack of addition storage that kept me from buying a Mac until the Mac SE/20 was introduced in 1987.
Next Steps
By summer, Hayes hired some consultants to look into the feasibility of developing communications software for the Macintosh. In just a few weeks, they had some rudimentary software going and concluded that it was quite feasible.
We were soon green lighted to create a product for the Macintosh.
By March 1988, the MC6809E V1 card I designed in 1983 needed updates. I built an entirely new card with new features intended to run OS-9 more effectively.
CPU
A MC6809 chip simplified things with the on-chip clock oscillator. The chip handled M.RDY without extra logic, and the rising edge of the Q clock did not need delay.
Memory
The MC6809E V1 card had no on-board RAM. There wasn't room. By 1988, a number of manufacturers had 32 KB static RAMs in 28-pin packages. 64 KB of memory is realized with a couple of chips.
For the V2 board, I allowed for eight chips, totaling 256 KB of memory. This was a good compromise between cost and the space available. The memory is logically separate from the rest of the card -- decoding from the physical address and data bus, using appropriate buffers. In this way, the memory can be accessed by a bus master other than the CPU. It responds to physical addresses C0000-FDFFF or FEFFF, jumper selectable. For years, it held two chips -- 64 KB on the board -- with only 56 KB accessible. The six remaining chips were added recently, making 248 KB or 252 KB accessible.
Buffering
20-pin bus driver chips reduced the chip count, even with two sets of bus drivers, one for the CPU, and one for the memory array.
Program ROM
The design allows for a much larger ROM. The MC6809E V1 card originally had two 2KB 2716-compatible sockets -- one for a ROM and another for ROM or RAM. To make swapping OS-9 and BBUG easier, I changed this to a single 4 KB 2732-compatible ROM socket
For the MC6809 V2 board, the ROM can be a 2764, 27128 or 27256-compatible device, holding 8 KB, 16 KB or 32 KB, respectively. The larger ROM permitted more OS-9 modules to reside there, if desired.
As built, a 2764-compatible EPROM is used, containing a BBUG image in one 4 KB half, and the OS-9 ROM image in the other 4 KB half. A jumper selects which half is active. This is much easier than swapping chips to go between BBUG and OS-9.
Accessing the correct amount of the ROM requires clever decoding.
Decoder
A hard-wired decoder would limit the flexibility of the system, and it would be complex and difficult to change. Rather than discrete logic, the decoder consists of a Cypress Semiconductor CY2C291 2Kx8 EPROM. This is a fast device with a 70ns access time. The CPU address lines A5 to A15 are connected directly to A0 to A10 on the chip. The decoder is enabled with the logical OR of E and Q, which asserts during three quarters of the memory cycle. This way, the eight data output pins can be used as decoder selects programmable on every 32-byte segment of memory.
Three select lines are used: one for bus access (including the on-board memory array), one for the program ROM, and one for the DAT. Each select line is pulled up to +5v. Placing a 0 bit in the decoder ROM data array makes the select line active for that 32-byte memory segment.
Modifying the memory map becomes a simple matter of programming the decoder ROM. I programmed the following logical memory map:
0000-EFFF - Bus
F000-F77F - Program ROM
F780-F7FF - Bus
F800-FFFF - Program ROM
FFE0-FFFF - DAT (writes only)
This configuration is compatible with the existing ROMs for BBUG and OS-9, which require I/O at E000-E07F. It has 4KB of program ROM, except for the hole at F780-F7FF. This hole deserves a bit of explanation.
I/O Port Address Migration
BBUG occupies the top 2 KB of ROM. The OS-9 ROMs take up nearly 4KB. However OS9p2 doesn't use the last 128 bytes of that space. This unused space became an alternate location for the I/O ports. If the I/O ports moved from E000-E07F to F780-F7FF, the MC6809 could use RAM in the logical E block (E000-EFFF), for a total of 60 KB of RAM, up from 56 KB.
Moving the I/O address requires motherboard decoder changes and software changes to the BBUG and OS-9 ROMs, as well as revision to Flex09 and OS-9 I/O configurations. The V2 board decoder ROM would work with the existing motherboard, or with the motherboard and ROMs altered for the new I/O addresses.
Larger ROM
Once the I/O addresses are moved, the decoder can be reprogrammed to allow for more ROM space. This opens the option of moving OS-9 modules into ROM. The decoder allows the lower limit of the ROM to be changed in 32-byte increments. This allows an OS-9 system to be entirely in ROM. OS-9 would start from the reset button without requiring a boot disk.
DAT
Back side of MC6809 V2 card.
The DAT configuration is similar to the MC6809E V1 board, with one important difference. In the SWTPc MP-09 board, as well as my V1 board, the outputs of the DAT are inverted on the lower four bits (A12-A15), but non-inverted on the higher four bits (S0-S3).
This means that values programmed into the DAT must be one's complemented on the lower four bits (A12-A15), with the higher four bits (S0-S3) not complemented.
For the V2 board, all eight bits of the DAT are inverted on the bus. Thus, the value programmed into the DAT is the one's compliment of the highest eight physical address bits (A12-A15, S0-S3).
Which makes programming correct DAT values simpler, since the entire byte is complemented.
I introduced a hardware bug in the DAT decoder. More on this later.
Building
Rather than wirewrap, I opted to try something new. A technician from work gave me a couple of 3M Scotchflex Breadboarding kits. This breadboarding system was brilliant. Chip sockets connected to IDC pins. Wiring is accomplished by forcing wire-wrap wire between the IDC pins with a special tool.
It is way easier than wire-wrap, because there's no tedious cutting, stripping, threading and winding of wire. One lays the wire down and pushes it on to the pins. Wiring several connections in succession, such as with a bus, is a breeze. The results also look great. The IDC pins are low profile, so there's less chance of shorting a connection than with wire-wrap.
It's sad 3M discontinued this product. It was great. 3M has since re-used the Scotchflex brand on three other products.
Fixing the Bug
The MC6809 V2 board worked great. There were no wiring errors. I did find a problem with the DAT.
In the default BBUG and OS-9 configuration, the DAT is written once during reset and never touched. And that seemed to work just fine.
Then I started playing with an OS-9 driver called VDisk. It created a virtual disk from selected extended memory blocks. At the time, I had 56 KB of memory from the MC6809 V2 card, plus another 60 KB from the Digital Research Computers / Tanner card. That made possible a 60 KB virtual disk.
Every time I tried to access the virtual disk, the computer would crash. This took a while to track down.
I eventually realized the new decoder did not take into account the clock cycle when accessing the DAT. Transients on the R/W* line early in the clock cycle could cause bad data to be written to the DAT. After I added the missing gate, the Disk driver worked perfectly.
Usage
Like the MC6809E V1 board, this V2 board was exactly how I wanted it. There are only two jumpers.
The jumper at the top edge of the board selects the 4KB portion of the EPROM. This makes it easy to switch between OS-9 and BBUG. No more hassle of changing out chips - just move a jumper.
The jumper in the middle of the board, just above the decoder ROM enables the FE000-FEFFF block of on-board memory. This would be installed once the motherboard I/O addresses are moved out of the E-block of memory and would allow 60 KB of RAM to be used.
Future
Moving the I/O addresses out of the E-block gains 4KB more usable memory for OS-9. Perhaps I'll try that in my retirement.
Another fun project would be to put a full OS-9 Level I system into ROM. Unfortunately, all of the essential modules take up just over 16 KB of memory, so the division doesn't fall on a natural 4 KB boundary. This might cause a conflict accessing extended memory with the DAT. I'd also have to figure out how to program the decoder ROM. There are not many EPROM programmers that can program the Cypress Semiconductor CY2C291 devices, and I no longer have access to the ones I originally used.
OS-9 Level II
This design works well for OS-9 Level I. To run OS-9 Level II, which allows each process to have a full 64 KB address space, requires more hardware. First, a second set of DAT memory chips allows the user and supervisors states to have separate memory maps. Second, a means of switching between those maps automatically -- like when servicing and returning from interrupts. Third, would require ROM to be accessible from an extended memory address, and then mapped into the supervisor space.
Those requirements go beyond the scope of this design. Perhaps there's room for a V3 board. All of this assumes access to a copy of OS-9 Level II, which may be difficult to find.
To work on OS-9, I borrowed some 5 1/4" drives, and used the SWTPc DC-2 controller. This allowed me to boot up OS-9. Single-sided, single-density, 40-track diskettes hold about 100 KB -- they were quite limited on space.
Running OS-9 on single-sided, single-density 8" disks, the situation was a little better, as each drive has about 300 KB of storage. But my two-drive system was limited. Plus, I was something of an island. None of my friends using OS-9 had 8" disks, so I couldn't exchange data with them. It was time to consider 5 1/4" drives.
5 1/4" disk drives went through considerable evolution since their 1976 introduction. The early drives were single-sided, single-density with only 35 tracks. By 1987, double-sided, double-density drives sporting 80 tracks were common. These disks could hold about 640 KB, more than twice what my single-sided, single-density 8" drives held. (And more than single-sided, double-density 8" drives could as well)
Disk Controller
In August 1987, I designed a 5 1/4" floppy disk controller. The 5 1/4" controller is very similar to the 8" design, with appropriate changes for the disk interface.
A MOTOR ON* signal is generated any time the WD2797 is accessed, with a one-shot multivibrator holding that signal for 10 seconds. Another one-shot asserts the READY signal on the WD2797 after a second of MOTOR ON*. 5 1/4" disks always have the heads loaded, so HLD is tied to HLT.
Back side of 5 1/4" controller
Double-density is jumper-selectable to either follow drive select bit 7, or the SSO output. Side selection is controlled by drive select bit 6. Write pre-compensation isn't used, as it was unnecessary for 5 1/4" disks.
I built the controller the same piece of 0.1" perfboard that originally held the FD1771 disk controller for 8" disks. The board is a little bit smaller than the WD2797 controller for 8" disks, so it appears more densely packed. Wire-wrap techniques are used for the wiring, and a handful of connectors and discrete parts are soldered.
Drives
For initial troubleshooting, I borrowed the two drives and power supply from a Sage II computer from work, which I had to return. I needed my own drives.
How many drives did I need? I decided three drives would be sufficient -- one boot disk, and two working disks. This would allow me to copy disk to disk, while still having the boot disk with commands in place. (and no crazy disk-swapping for copies like the original Macintosh that had one disk drive!)
I bought two Tandon TM100-4 drives at a local hamfest. These were common surplus from Lanier word processing units at that time. When I went to buy a third drive, I could no longer find any. I ended up with a Mitsubishi M4853 drive. The specs of the drives are virtually identical, except the Mitsubishi is a half-height drive.
Drive Cabinet
5 1/4" Drive Cabinet
Finding a cabinet to house three drives was a problem. New metal cabinets are very expensive, particularly in larger sizes, and I couldn't find anything suitable on the surplus market.
September 1987, I built a wooden cabinet to proper dimensions for three TM100-4 drives. I used 1/4" plywood, reinforced at the corners with 1x1/2 strips. The bottom, back, sides and one quarter front panel are all glued together as one unit. The top screws on to the four corner posts. The finished unit is quite sturdy.
As originally built, the cabinet was plain unfinished plywood. I recently sanded and finished it with a couple of coats of polyurethane.
Inside the box, plenty of room.
Power comes from a 12 volt, 5 amp supply. 5 volts is provided from a single LM7805 regulator mounted to that supply. In retrospect, the LM7805 might be a bit over-taxed. I suspect the drives draw less power than their maximum specifications. Heat is removed from the cabinet by a small (but noisy) muffin fan on the back panel.
A power switch and neon pilot light round out the front panel, giving a clear indication the unit is on.
The controller and drives work great, easily formatting double-side, double-density disks using 80 tracks.
Drives & Software
In April of 1989, I revised all the disk drivers to handle double-density, double-sided drives. The BBUG monitor "D" command code was updated to look for double-density sectors, and the boot loader for Flex09 updated to read double-density, double-sided disks.
For OS-9, I modified an existing driver (FD2) for the Processor Technology PT69 to work with my disk controller and created a new boot disk with several drive descriptors. The drivers and descriptors allowed for 40-track disks (which required double-stepping of tracks, and adjusting the track register), and SWTPc format, where track 0 is formatted single-density -- as well as the standard, double-density, double-sided, 80-track format.
I updated the Boot module to handle double-density, double-sided disks and burned a new OS-9 ROM.
The result is a smart, efficient unit roughly the same size as the SWTPc 6800 Computer System cabinet. The fan is a little noisy, but was typical for the day.
Future
The Tandon and Mitsubishi drives only require 250 ms to get up to speed after MOTOR ON*. I can shorten the timing on the one-shot driving the READY signal.
If I can manage to find a second Mitsubishi M4853 drive, four drives would fit into the cabinet. I'd need to add a second LM7805 regulator for the 5-volt supply, and split the 5-volt output across two drives for each.
One limitation of the WD2797 is the track to track and head settling time. These drives can move track to track in 3 ms and need 15 ms for the head to settle. The WD2797, using a 1 MHz clock for 5 1/4" drives, can only do 6 ms and 30 ms, respectively.
Western Digital did manufacture another device, the WD1772-00. This was a 28-pin floppy disk controller for 5 1/4" drives that is software compatible with the WD179x and WD279x devices. The WD1772-00 allows faster track to track and head settling times -- up to 2 ms and 15 ms.
The biggest problem is finding one, as the WD1772-00 wasn't used in a lot of designs, and Western Digital stopped manufacturing them over a decade ago. Might be interesting for a V3 floppy disk controller card.
I learned about OS-9 in early 1983, when it was new. What I heard mainly concerned BASIC09 and at that time BASIC didn't interest me. That was unfortunate. OS-9 is a miniature Unix clone, optimized for the 6809.
Baud rate generator and counter/timer board
Requirements
By fall of 1986, I tired of the limitations of Flex09, and started looking at OS-9. Bringing up an OS-9 system didn't have the same challenges as Flex09, since OS-9 can format 8" diskettes. OS-9 does have additional hardware requirements. It needs a periodic source of interrupts.
Interrupt Logic
The OS-9 CLOCK module has logic for several interrupt sources, using chips available at the time. The MC6840 programmable counter/timer chip, with three 16-bit programmable counter/timers, was one option. The MC6840 fit nicely on the bit rate generator board. The driver allowed two circuit variations.
The circuit I chose exercises all three counter/timers. Timer 1 counts 50,000 cycles, then trips Timer 2 and 3. Timer 2 counts twice and signals an interrupt. Timer 3 counts down from 90. In this way, Timer 2 provides regular interrupts every 50 ms on a 2 MHz system. Timer 3 counts interrupts and adjusts the system clock whether or not the Timer 2 interrupt is serviced every 50 ms.
ROMs
The OS-9 kernel has two modules burned into ROM: OS9p1 and OS9p2. I obtained two 2KB ROMs and programmed them with the images. OS9p1 resides at F800. OS9p1 initializes the kernel, then searches for installed modules, which are position-independent. The second ROM contains OS9p2, Init and Boot. Once OS9p1 finds the OS9p2 module, it initializes it. OS9p2 looks for certain key modules, like IOMan. If they cannot be found, it uses the Boot module to load the rest of OS-9 from a floppy disk.
Once initialized, OS9p2 uses the information in the Init module to start executing. During a soft reset, OS-9 does not always load from disk. If the modules are not altered, OS9p2 can find them and bypass the boot process.
The modular structure of OS-9 allows great flexibility. Modules can be in ROM or loaded from storage devices. The Init module provides the configuration to execute the first module.
Bootstrapping
With a little help from a working OS-9 system, bootstrapping was straightforward. The ROMs I started with were pretty generic SWTPc system ROMs. The MC6840 occupied the bit rate generator board. I borrowed a 5 1/2" disk drive and plugged the DC-2 controller into I/O slot 1, with the 8" controller in I/O slot 2. Armed with a single-sided, single-density 5 1/4" boot disk, I successfully booted OS-9. That was the hard part.
From there, I created a new 5 1/4" boot disk with drivers and configuration for my 8" drives. Booting from this new disk, I formatted 8" disks and moved the OS-9 files to them. I then created an 8" OS-9 boot disk with a new I/O configuration and drivers for both 8" and 5 1/4" drives. At that point, I swapped the floppy disk controller slots, with the 8" controller in I/O slot 1, and the DC-2 in I/O slot 2. (The Boot module is configured to find a WDC-compatible floppy disk controller at the address for slot 1)
At that point, I could boot OS-9 from my 8" drives, and was able to copy files from the 5 1/4" disks. Compared with bringing up Flex09, this was easy.
I tailored my configuration to suit my hardware, and updated the ROMs with customized modules.
Swapping BBUG/Flex09 and OS-9
While I was using OS-9, I would swap back to BBUG and Flex09 on occasion. This was a pain. I would swap out the two 2 KB ROMs and use a different boot disk.
In late October of 1986, I modified the MC6809E V1 board to use a single 4 KB 2732 ROM. This put all of the OS-9 kernel on one chip, and allowed room to expand BBUG. With this modification, only one chip was swapped.
Extended Memory
Working with OS-9 uncovered an issue with extended memory addressing. December 1986, I installed a 74LS21 4-input NAND gate on the SWTPc motherboard to decode the top address bits S0-S3. This placed the I/O addresses at FE000. With the MC6809E V1 board, this worked great with BBUG and Flex09. BBUG initialized the E-block of the DAT with a value F1 -- which the board would interpret as physical address FE000.
However, I found I could not boot into OS-9 any more. Turns out, OS-9 initializes the E-block of the DAT using a value 01, which the board interpreted as physical address 0E000. With the extended addressing decoder on the motherboard, the OS-9 Boot module could not communicate to the I/O devices. This forced me to disable the 74LS21 decoder.
User Experience
OS-9 Level I uses a single 64 KB memory space for the operating system, programs and data. That's not a lot of memory. Many OS-9 programs are small, being written in assembly language. Larger programs, like a compiler, load in as multiple passes, to conserve memory use.
Using OS-9 is cool. It is a real-time, multi-tasking operating system, first available in 1982. Windows wouldn't have comparable functionality until 1989 (Windows NT), and the Mac in 1999 (MacOS X). Like Unix, you can spawn off programs to run concurrently in the background.
Using a second serial port, I ran two users simultaneously, one from the main terminal, and one from the second serial port. I used a Wyse-85 terminal on the main port, and the old CT-64 on the second port. Amazing on an 8-bit machine with 56 KB of memory!
At some point, I hung a modem on the second port. I could leave the machine running at home and dial into it from work.
By the summer of 1985, my original CT-64 terminal felt limited. Sixteen rows of 64 characters didn't seem like enough. Especially when at work I regularly used screens with at least 25 rows of 80 characters. In 1977, terminals with such capabilities were around $1000 -- way beyond my modest budget. By 1985, much more capable terminals were available for about half that price. It was time to upgrade.
August of 1985, I purchased a Wyse-85 terminal for about $700 -- a good price for the time. The terminal offed a DEC VT-220, VT-100 and VT-52 emulator, so it was plenty capable. It sported 24 or 25 rows of 80 or 132 columns on the screen. I purchased the green phosphor screen.
The most important thing, however, about the Wyse-85 compared to the CT-64 was speed. The CT-64 was limited to a paltry 1200 bps. The Wyse-85 had a top speed of 38400 bps. Thirty-two times faster. The CT-64 would take more than eight seconds to write every character on the 16 x 64 screen. The Wyse-85 could write an entire 25 x 132 screen in less than a second.
The Wyse-85 was such a joy to use compared to the CT-64, I couldn't believe I hadn't done this sooner.
I did have trouble with this terminal when I tried to use it in the shack back in the late 1980s. The keyboard scan generated a fair amount of RFI. Putting several ferrite toroids on the keyboard cable helped a little, but did not eliminate the problem.
I still have this terminal. It's been stored in the original box since November of 1994. I hope it still works.
WD2797 controller card for 8" Pertec drives in the Icom Peripherals FD360
The FD1771 disk controller works well with the Pertec 8" drives. The single-density drives each hold around 300 KB of data.
Single-density encoding is FM, which has regular clock pulses, with a data pulse placed between. A data pulse indicates a "1", a missing pulse is a "0".
Double-density uses Modified FM (MFM) encoding. It eliminates the clock pulses entirely, leaving only the data pulses. To keep synchronization during runs of zeros, extra pulses are inserted between each pair of zeros. Encoded in this way, the clock can be recovered from the data pulses alone.
Western Digital followed the FD1771 with the WD179x chips, which support double-density with a two device solution. The later WD279x chips offer the same features on a single device. Double-density allows 500 KB on the same disks, with the data transfer rate also doubled.
WD2797 8" Controller
Back side of the 8" controller
September 1986, I built a new controller using the WD2797 to support the Pertec FD400 drives. While the drives were designed for single-density, I hoped they would work using double-density.
In keeping with my other home brew cards, it's built on a piece of 0.1" perfboard with the Molex connectors epoxied to the bottom edge. Wire wrap sockets are used.
Naturally, I broke out the WWARP program I used years before to build the MC6809E V1 card.
The WD2797 design borrows from the FD1771 design. I kept the latching data bus buffer, but eliminated the redundant data bus buffers in front of them. The WD2797 performs the clock/data separation, which eliminates several gates. Fourteen total chips on this board, whereas the FD1771 board used more like eighteen.
Double-density is enabled through an option jumper. The SWTPc DC-4 controller used the SSO output to drive the DDEN* pin through an inverter. (SWTPc offered double-density before double-sided disks) One side effect of using SSO is the sector address markers will have side 0 for single-density sectors and side 1 for double density sectors.
Other designs used bit 7 of the drive select latch, controlled through software. SSO isn't connected to anything, as the Pertec drives only have one side.
A jumper at the top of the card chooses the DDEN* signal source: the SSO pin, or bit 7 of the drive select latch. Both paths go through an inverter, so double-density is selected with a 1 on either the SSO pin or bit 7.
Bit 3 of the drive select latch controls ENP - the pin for write pre-compensation. Generally, ENP would connect to the TG43 output of the floppy drive interface. Using a separate bit allows write pre-compensation to be enabled or disabled at any time, through software. I didn't know if write pre-compensation would be required or desired. It seemed like a good plan to allow write pre-compensation on any track, since the Pertec drives weren't designed for double-density.
Reading the drive select latch address returns the state of the INTRQ* and DRQ* pins, on bits 7 and 6, respectively. Using these separate bits allows more efficient loops than reading and interpreting the status bits of the WD2797. The SWTPc DC-4 introduced this feature, and is common to controllers of that era.
The WD2797 calibration starts by grounding the TEST* pin and checking three signals with a scope. A set of four pins at the base of the WD2797 chip bring these signals out making calibration easier.
To support the new controller, I re-wrote the Flex09 disk drivers to allow double-density operation.
Do the Pertec drives work at double-density? I don't know. Supporting double-density meant re-writing NEWDISK to initialize in double-density format. Before I figured that out, my interest shifted from Flex09 to OS-9, and I did not complete that project. But the card works great with single-density.
I’ve been making a few improvements to my QO-100 Node Red Dashboard whilst waiting for the 2.4Ghz hardware to arrive. I’ve added the ability to split the RX and TX VFOs so that I can tune away from the TX frequency for working split stations or for tuning to slightly off frequency stations. I also added a series of tuning buttons to the top of the GQRX side of the dashboard to enable easy tuning using the trackball connected to my Kubuntu PC. This worked well but, I really missed having a real VFO knob like a conventional radio.
As I had a Griffin Powewrmate USB VFO from a previous SDR radio I added it to the flow as well so that I had a physical VFO knob for the SDR receiver. Details on how I got it working using evtest and a simple BASH script are in the Griffin Powermate article.
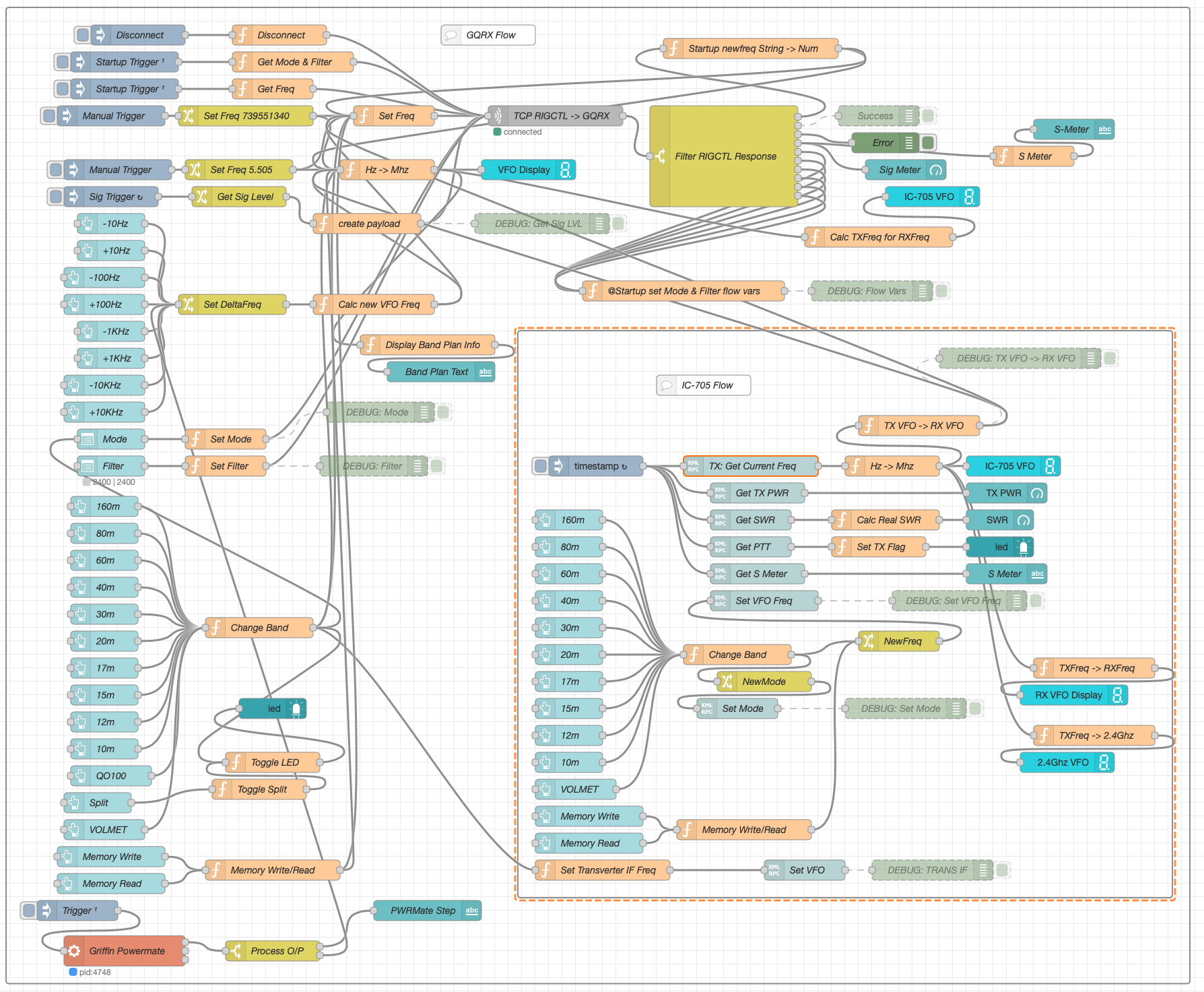
M0AWS QO-100 Node Red Dashboard Flow
The Node Red flow is looking a little busier with the addition of split mode and the Griffin Powermate USB VFO which has really enhanced the useability of the solution. It’s very impressive what can be achieved with Node Red with a little imagination. You really don’t need to be a heavy weight programmer to make things work.
M0AWS QO-100 Node Red Dashboard as of 07/06/23
I also put together some code to calculate the S Meter reading from the dBFS data the GQRX SDR software generates. It’s not 100% accurate but, it’s close enough to be useful.
On the IC-705 side of the Dashboard I also now display the 2.4Ghz uplink frequency so that it’s available for logging.
So with the QO-100 Dashboard ready to go live I have now started putting together the 2.4Ghz transmit path of the ground station. I have the 2.4Ghz transverter and matching 12w amplifier from DXPatrol, the IceCone Helix 2.4Ghz antenna from Nolle Engineering, some LMR-400-UF and connectors from Barenco and an appropriate water proof enclosure from Screwfix to fit all the kit into however, I’m now being held up by one simple little SMA male to SMA male connector that I need to connect the transverter and amp together.
M0AWS Waterproof enclosure from ScrewfixM0AWS Laying out the 2.4Ghz TX kit in the enclosureM0AWS LMR-400-UF coax from Barenco
The SMA connector has been ordered but, is taking a month of Sundays to arrive! Hopefully it’ll arrive soon and I’ll finally get on the QO-100 satellite and start enjoying the fun.