via Hackaday: Revisiting 1990’s Mac Games That Never Were
3 October 2024 at 16:45

Ever since I started using Node-RED I’ve been using the standard node-red-dashboard set of user interface (UI) nodes to build my numerous dashboards to enhance my radio hobby and add new functionality to the operating of the station. The series of UI nodes are very simple to use and have served me well however, they are no longer being developed and are now deprecated in the overall Node-RED project.
To this end flowfuse.com have stepped up to the mark and developed Dashboard 2.0. This new series of UI nodes brings a new, more modern look and feel to the Node-RED dashboard along with some new functionality.
I’ve only just started investigating Dashboard 2.0 but, it’s proving to be fairly easy to use. The short video clip above shows an S-Meter display developed using Dashboard 2.0 for my FTDX10 transceiver.
Full instructions on how to install and configure Node-RED Dashboard 2.0 can be found on the flowfuse.com website.
Be aware though, Node-RED dashboards developed using Dashboard 1.0 will not work under Dashboard 2.0, you will have to import the old v1.0 flow(s) and manually go through them and change all the UI nodes to new Dashboard 2.0 nodes. Since some of the new nodes work differently to the old nodes you’ll also find you will need to make code changes to get the same/similar functionality.
I’m finding it easier not to import old flows but to recreate them afresh under Dashboard 2.0 using the old flow version for reference.
Overtime I will migrate my dashboards over to the new 2.0 version however, this is going to be a lot of work, especially in the case of my QO-100 Ground Station Dashboard as it contains a considerable number of UI nodes, and will take a fair amount of time to migrate.
I’ll document my findings as I go as I’m sure there will be a few trials and tribulations along the way.
Thanks to Neil, G7UFO for pointing me to the new Dashboard 2.0 information.
More soon …
Ever since I built my RaspberryPi/SHARI AllStarLink node I’ve had to manage connecting/disconnecting to/from other nodes using the Allmon2 or Supermon web admin interfaces. These work fairly well albeit, a bit clunky and buggy. It’s impossible to use from a mobile device though and so I have to get my Macbook out each time I want to connect/disconnect nodes.
Being a Node-RED fanatic I decided that I should put something together that was more portable, mobile friendly and much easier to use. A simple user interface is all that is required and can be achieved very easily using the standard Node-RED dashboard nodes.
Initially I started investigating the Linux command-line interface for Asterisk, the VOIP system that underpins AllStarLink (ASL). I very quickly discovered that the ASL node can be very easily controlled directly from the command-line and that this would be an ideal interface to use to enable node management via a Node-RED dashboard.
In very little time at all I had an experimental control dashboard working with the ASL node and was able to connect/disconnect to/from a single node. All that was required now was to extend this so that I could connect to a number of nodes with nothing more than a push of a button.
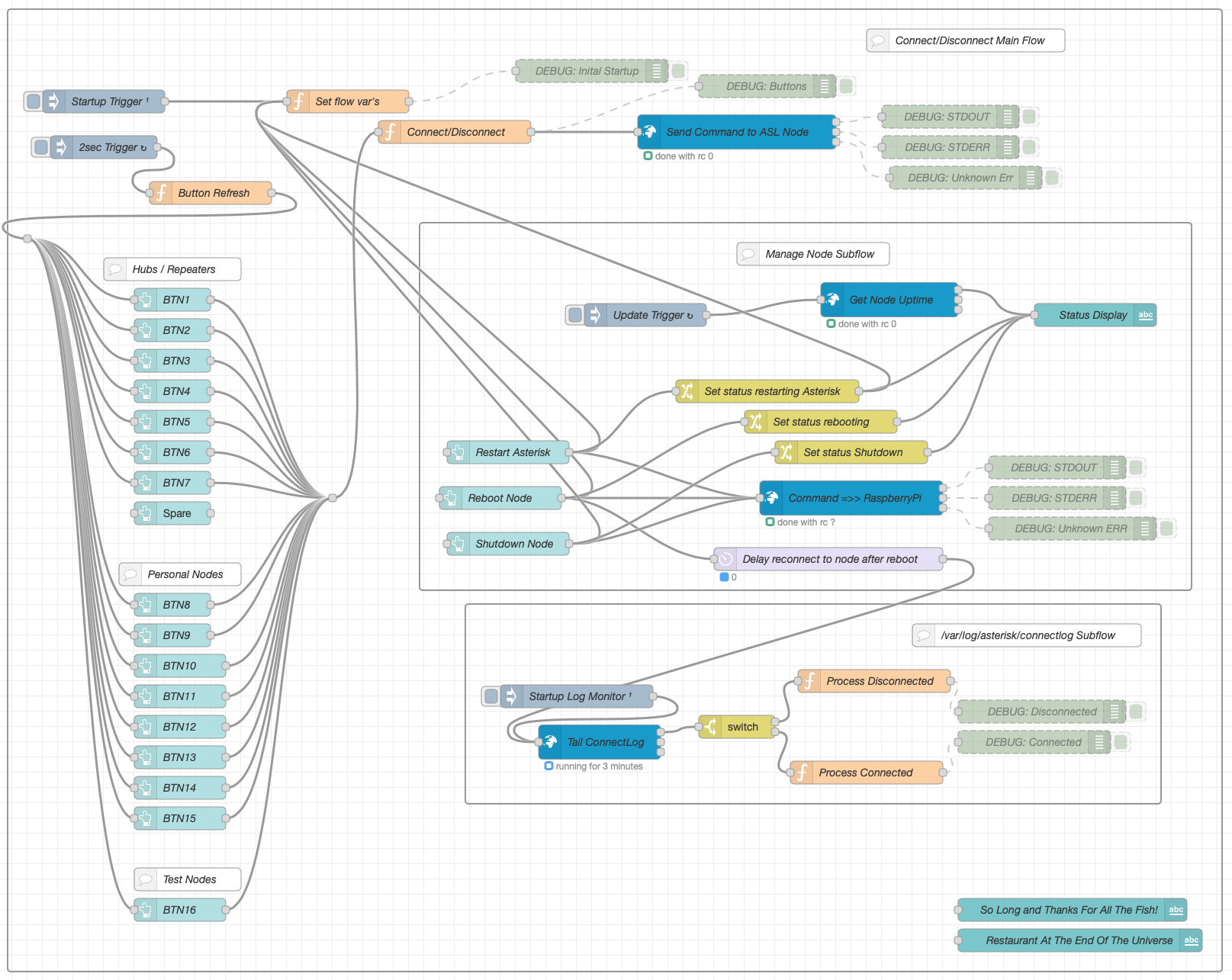
The resultant flow consists of 3 sections, Connect/Disconnect Main Flow, Manage Node Subflow and /var/log/asterisk/connectlog Subflow.
The Connect/Disconnect Main Flow handles all the input from the buttons on the dashboard and the communication to the underlying Asterisk VOIP system.
The button status is denoted by 3 colours, green (Ready to connect), orange (Transitioning to/from connect) and red (Connected). Each button is updated automatically by the button refresh function that is triggered every 2 seconds.
The Manage Node Subflow provides a simple interface to restart the Asterisk VOIP system, reboot the RaspberryPi and shutdown the RaspberryPi. The node status is automatically updated every 45 seconds and will show when the Asterisk subsystem is being restarted or the node is being rebooted or shutdown.
Finally the var/log/asterisk/connectlog Subflow monitors the Asterisk connectlog looking for connect/disconnect messages so that it can signal to update each button status.
Each section of the dashboard can be collapsed/opened by touching/clicking the little blue arrows on the right of the dashboard. The dashboard works fine on Android, iOS, Windows, MacOS and Linux.
If you’re not familiar with Node-RED and haven’t yet installed it to your PC, take a look at the Node-RED Getting Started Page. The information takes you through installing Node-RED onto a multitude of devices including PC and RaspberryPi devices.
Once you have Node-RED installed all you need to do is download the AllStarLink Control Dashboard Flow and import it to your Node-RED flow editor.
Once downloaded, select Import from the burger menu icon on the right-hand side of the flow editor as shown below and import the flow file.
Once imported you will find that some of the nodes in the flow are not available. This is because you need to add them to the flow editor palette before being able to deploy the flow.
Drop down the same menu as shown above but, this time select Manage Palette. This will open another window where you will need to select the Install tab as shown below.
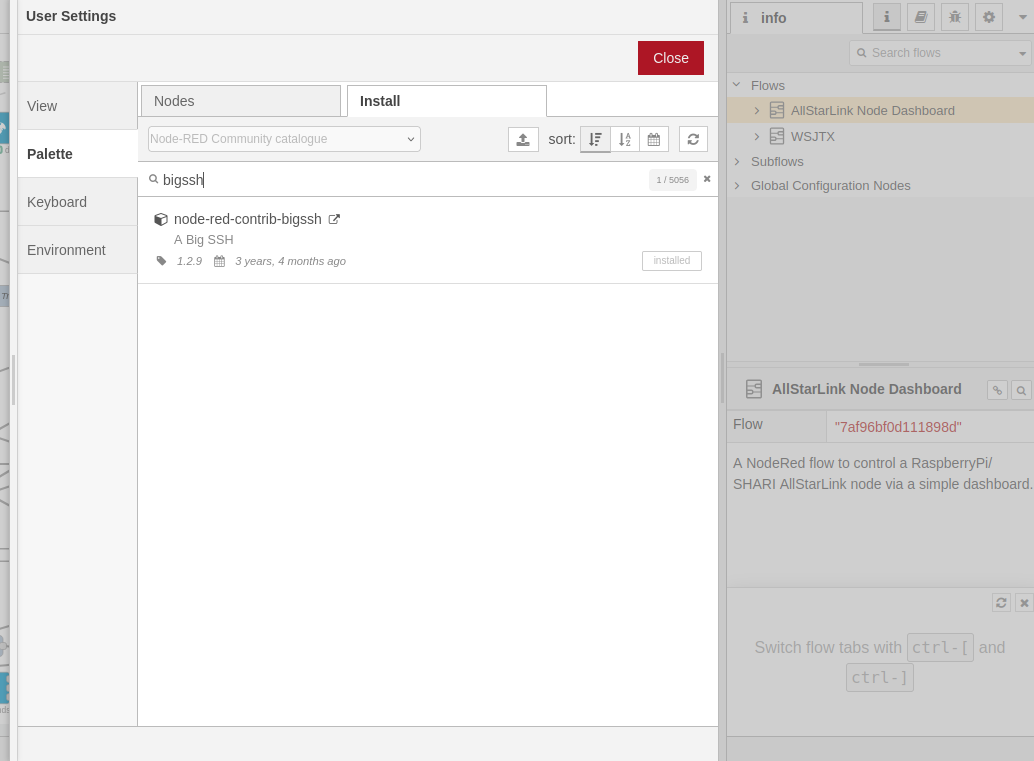
You need to install two node sets to complete the flow, node-red-contrib-bigssh and node-red-dashboard. Type in the name of each package one at a time in the search bar and then click the Install button.
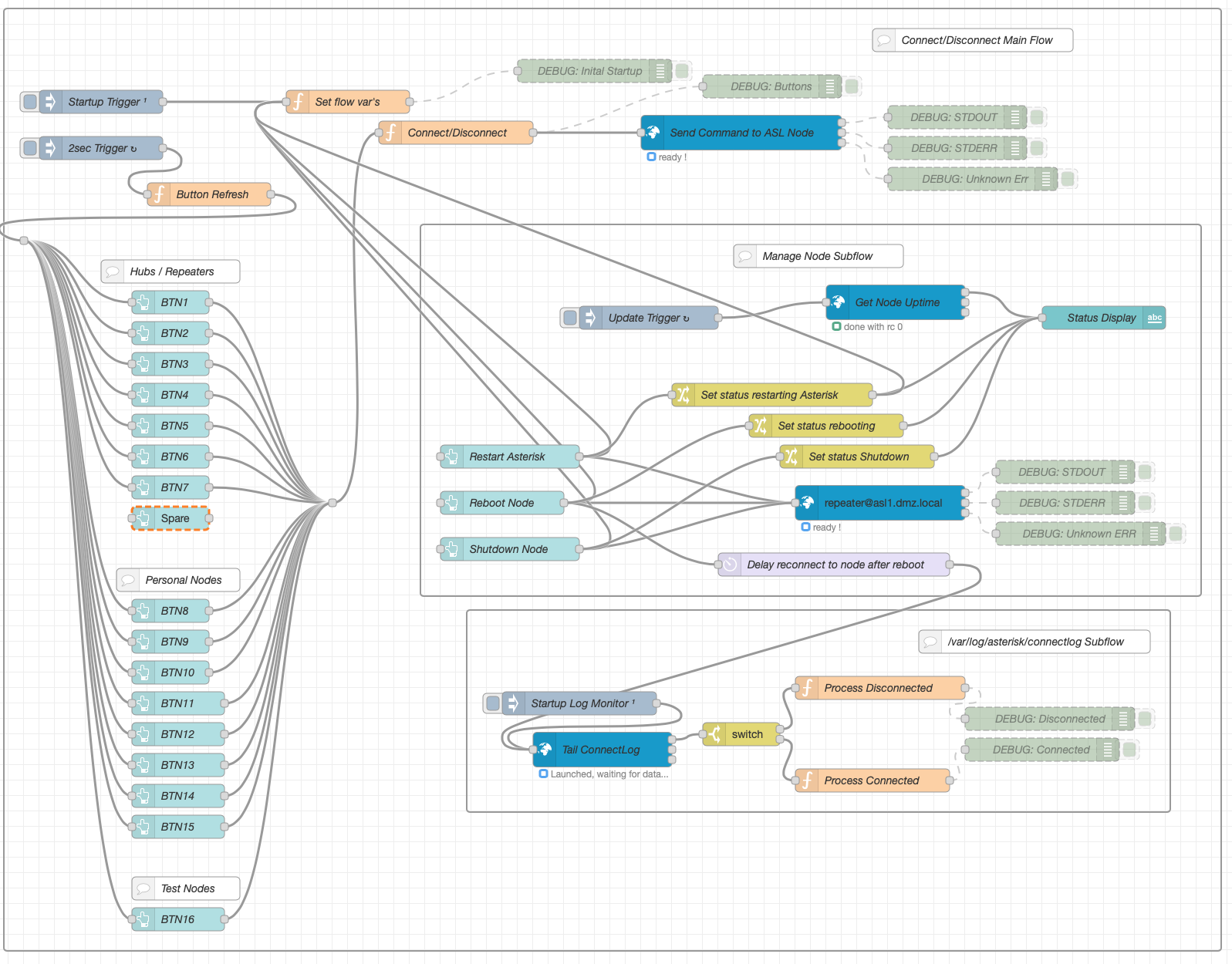
Once the two packages are installed you then need to configure the credentials for logging into your RaspberryPi. This is simply done by double clicking the blue Send Command to ASL node at the top of the main flow and then clicking the Pencil button at the end of the Credentials field. This will open another window where you will need to type in the IP Address of your ASL RaspberryPi into the Host field, then enter 22 into the port field, add repeater into the Username field (repeater is the default username, if you have changed this then you will need to add the new username name in instead) and then the password associated with the repeater login into the Password field. (Normally allstarlink)
Once this is done, do the same on the other blue nodes, namely “Get Node Uptime“, “Command =>> RaspberryPi” and “Tail ConnectLog”.
The final thing to setup is the dashboard size. Click on the downward pointing triangle at the top right of the menu bar (under the burger menu) and select dashboard. Check that the sizes are set the same as in the image below. For some reason, these settings aren’t always imported (Possible bug?) so, if your dashboard layout isn’t like shown above it will be because these settings failed to import.
You are now ready to deploy your AllStarLink Control Dashboard!
Press the red Deploy button at the top of the flow editor window.
To access the dashboard from any device, open your favourite web browser and enter the following URL: http://IP-Address-of-Node-RED-Computer:1880/ui
Finally, if you want to change the nodes that each button connects/disconnects you will need to edit the set flow var’s function at the top of the main flow. All you will need to do is replace the existing node numbers taking care not to alter the rest of the code in any way otherwise, it could stop the flow from working.
Once you’ve edited the node numbers, double click on the associated button node and change its Label to show the new node name.
Once your changes are complete, Deploy the flow again and your changes will be live.
This is version 1 of the ASL Dashboard, I already have ideas for version 2 that will also have the ability to enter a node number into a field and connect to it without the need to program it into a button.
More soon …
In 1985, I built a home-brew decoder and experimented with RTTY, but I never got it to work. I've since decided that I didn't know how to tune RTTY properly. Things changed in 2005 when I downloaded CocoaModem made my first RTTY contacts.
Since I was involved in contesting, I naturally turned to RTTY contesting. Today, it is unusual to hear RTTY signals on the bands except during contests. Thirty or more years ago, RTTY was commonly heard on 80 and 20m.
For effective RTTY contest communication, several principles apply.
{TX}{ENTERLF}{MYCALL} {MYCALL} {RX}
or
{TX}{ENTERLF}* * {RX}
(For N1MM, the asterisk and {MYCALL} macros are the same)
Notice the message starts with {TX}, performs a carriage return / line feed with {ENTERLF}, sends the call twice, ends with a space and then {RX} to go back to receive. Sending the call twice helps to ensure the recipient receives it correctly.
If you are lucky enough to get a response, you'll have to send the exchange. The exchange will vary by contest, but it could be a message like this:
{TX}{ENTERLF}! 599 GA GA DE {MYCALL} {RX}
This is what I send in the RTTY Roundup. First is the recipient's call (!). Then 599 -- don't use 5NN, because that actually takes longer to send in RTTY -- and send it only once, because it isn't important. Then the exchange is sent twice, followed by the prosign DE and my call, followed by a space.
N1MM's authors recommend you use the ! character rather than the {CALL} macro. The reason is that {CALL} isn't subject to correction -- it sends the contents of the Call field at the start of the message. The ! character will send the Call field as it is being corrected in real time. As a practical matter, most RTTY contest contacts involve pointing and clicking on callsigns, so there's less typing, and therefore fewer corrections involved.
A couple of things here. Notice I did not use the {EXCH} macro above. When there are multiple elements to the exchange, I put the repetitions together. So, I tend put the exchange information into the macro directly. For example, here's an S & P exchange for CQWW RTTY:
{TX}{ENTERLF}! 599 GA GA 5 5 DE {MYCALL} {RX}
GA for Georgia, and 5 for zone 5. For NAQP RTTY, it would be:
{TX}{ENTERLF}! 599 BILL BILL GA GA DE {MYCALL} {RX}
Some might balk at the use of the DE prosign, particularly for exchanges that involve a state or section, since DE might be confused with Delaware. However, I think this prosign is useful, as it establishes the callsign is of the answering station, and not the CQing station.
{TX}{ENTERLF}CQ RU {MYCALL} {MYCALL} CQ {RX}
Note that the important information -- the callsign -- is repeated. The other curious thing is the "CQ" at the end. This indicates I finished a CQ message. This is important because one cannot tell when potential callers tune in to your signal. If they do so during the first callsign, the can't tell if you are calling or answering a CQ. Putting "CQ" at the end establishes you are calling CQ. And it is shorter than "QRZ?".
Naturally, one indicates the contest in the CQ message. Here it is "RU" for Round Up. Use whatever is appropriate for the contest, or simply "TEST".
When someone answers your call, you send an exchange message:
{TX}{ENTERLF}! 599 GA GA ! {RX}
Note that the exchange is sent twice, and if there were more than one element to the exchange, I'd send those twice as well:
{TX}{ENTERLF}! 599 BILL BILL GA GA ! {RX}
Another item to notice is there is no {MYCALL} macro in this message. Instead, the caller's callsign (!) is sent twice, once at the beginning and once at the end. There are two reasons for this. First, it follows the principle of sending important information twice. It could be the caller's callsign printed incorrectly to me, or perhaps it will print incorrectly when I send the message back. If I only send the callsign once, the caller might or might not correct it if is wrong, or they may correct it if it printed incorrectly to them.
Unnecessary corrections are a waste of time, but necessary corrections are desired.
Second, it may be that during the response with the exchange, other stations may also be calling. This, creates a good chance that the initial callsign in the response will print incorrectly. If you don't send the callsign again at the end, it could be unclear who you responded to.
Once you've received the exchange from the caller, one sends an acknowledgement:
{TX}{ENTERLF}! TU DE {MYCALL} CQ {RX}
Short and simple. Two features here. One is the DE prosign, to indicate this is the transmitting station's call, and ending with "CQ" to invite new callers.
{TX}{ENTERLF}! TU {LOGTHENGRAB}NOW..{ENTERLF}{F5} 599 GA GA {F5} {RX}
This message omits {MYCALL}, and uses the {LOGTHENGRAB} macro to first log, then grab the callsign off the automatic decode stack, then it follows with the normal exchange. If you use Single Operator Call Stacking, you can use {LOGTHENPOP} instead. See the N1MM manual.
Note that instead of using the exclamation point (!), we use the {F5} macro. Both the exclamation point and the {CALL} macro won't be updated by the {LOGTHENGRAB} macro, but {F5} will.
{TX}{ENTERLF}! 599 BILL GA DE {MYCALL} {RX} -- short S & P exchange
{TX}{ENTERLF}! 599 BILL GA {RX} -- short exchange for S & P or CQing
{TX}{ENTERLF}599 BILL BILL GA GA {RX} -- repeat of just the exchange
{TX}{ENTERLF}CQ RU {MYCALL} CQ {RX} -- short CQ
{TX}{ENTERLF}TU DE {MYCALL} CQ {RX} -- short acknowledgement
All these should be used when you have solid copy, want to get back to other callers quickly, or you are fairly certain the other operator already has your exchange information from a previous contact.
{TX}{ENTERLF}AGN AGN {RX}
Or perhaps you need a fill of one element:
{TX}{ENTERLF}STATE? STATE? {RX}
{TX}{ENTERLF}NR? NR? {RX}
{TX}{ENTERLF}NAME? NAME? {RX}
Before you open up with a CQ on a frequency, this is good one:
{TX}{ENTERLF}QRL? DE {MYCALL} {RX}
Maybe if you are not sure someone is calling you:
{TX}{ENTERLF}QRZ DE {MYCALL} {MYCALL} {RX}
Or the short version:
{TX}{ENTERLF}QRZ DE {MYCALL} {RX}
Every once and a while, directed call is useful, especially when two stations are calling CQ on top of each other:
{TX}{ENTERLF}! DE {MYCALL} {MYCALL} {RX}
Coding of version 1 of the AllStarLink Dashboard is now complete and in the final testing phase. Below is a short video clip showing some of the functionality.
The Node-RED flow for the web app is pretty compact and easy to alter should I add more functionality in the future.
The dashboard is designed such that it’ll display nicely on mobile phones, tablets and desktop computers so, I can easily control my AllStarLink SHARI node from any of my devices around the house.
I’ll put together a more detailed article on the web app once testing is complete and it’s ready to be released into the wild.
More soon …
Meshtastic devices have really taken off in the UK over the last few months and there is now an established Mesh across a large portion of the UK mainland.
Looking to expand the device capability I stumbled across a really interesting little project that is still in the early stages of development but, is functional and worth trying out.
The TC²-BBS Meshtastic Version is a simple BBS system that runs on a RaspberryPi, Linux PC or virtual machine (VM) and can connect to a Meshtastic device via either serial, USB or TCP/IP. Having my M0AWS-1 Meshtastic node at home connected to Wifi I decided to use a TCP/IP connection to the device from a Linux VM running the Python based TC²-BBS Meshtastic BBS.
Following the instructions on how to deploy the BBS is pretty straight forward and it was up and running in no time at all. With a little editing of the code I soon had the Python based BBS software M0AWS branded and connected to my Meshtastic node-1.
The BBS system is very reminiscent of the old packet BBS systems of a bygone era but, it is ideal for the Meshtastic world as the simple menus and user interface are easily transmitted in seconds via the Mesh using minimal bandwidth.
The BBS is accessible by opening a Direct Message session with the M0AWS-1 node. Sending the letter H to the node will get you the initial help screen showing the menu above and then from there onwards it’s just a matter of selecting the menu item and following the BBS prompts to use the BBS.
The BBS also works across MQTT. I tested it with Dave, G4PPN and it worked perfectly via the Meshtastic MQTT server.
This simple but, effective BBS for the Meshtastic network will add a new message store/forward capability to the Mesh and could prove to be very important to the development of the Meshtastic mesh in the UK and the rest of the world.
More soon …
We’ve recently added a new room to the Matrix HAM Radio Space for Digital Voice modes as this was an area of interest that didn’t really fit into any of the other rooms.
The new Digital Voice room has attracted a lot of attention from members, with a lot of the focus being on the AllStarLink system. Michael, DK1MI built an AllStarLink node in the cloud for us all to use for Matrix Nets and so I decided I had to get in on the fun.



The Jumbospot SHARI SA818 Amateur Radio AllStarLink Radio Interface was originally designed by N8AR and implements a RaspberryPi 2/3/4 hosted AllStarLink node using a NiceRF SA818 embedded VHF/UHF radio module and sound card.
The two USB connectors on the SHARI device are position such that they plug into two of the available 4 USB ports on the RaspberryPi without the need for cables. This keeps the whole solution together in one neat package.
Before you start you will need to obtain a node number and secret (password) from the AllStarLink Portal. To get this you will need to provide proof to the AllStarLink administrators that you are a licensed Amateur Radio (HAM) operator. This is done by uploading a copy of the first page of your HAM licence to the website for the admin team to check. This can take 24hrs to be completed so make sure you get this all done before trying to build your node. You cannot build a node successfully without a node number and secret.
Of course you will also need a transceiver that can operate on the 438.800Mhz frequency or other frequency of your choice on the 2m or 70cm HAM band.
You will also need to open port 4569 on your internet router and setup port forwarding to the IP Address that you will be using on your RaspberryPi node. It’s important to use a static IP Address on your RaspberryPi.
There are quite a few different Linux based operating system (O/S) images that are available for the RaspberryPi devices that have been specifically tailored for the AllStarLink node and include all the necessary software and library packages out the box.
I decided to use the Raspbian GNU/Linux 10 (buster) based distribution as it is based on the very stable and reliable Debian Linux distro. You can download the exact version I am using from the Raspbian link above or directly from my website here.
Once downloaded you need to burn the ISO image onto a suitable SD card for your RaspberryPi. I use BalenaEtcher as it’s extremely quick and reliable at burning ISO images to SD cards.
Of course if you are a hardline Linux command line junkie you can always use dd to create the SD card.
Once you’ve got your O/S onto your SD card, slot it into your RaspberryPi making sure your SHARI device is connected to the two USB ports and then power it up. Make sure you have a good PSU for the RaspberryPi as the two devices together draw around 3A of current during the transmit cycle. (I use a 3.6A PSU from Amazon).
The default login for the Raspbian O/S is shown below. Login via SSH and configure your RaspberryPi for your local network. It’s important to use a static IP Address configured either directly on the RaspberryPi or via DHCP in your router.
Login: repeater
Passsword: allstarlink
SSH port: 22Once you have your RaspberryPi connected to your LAN you are ready to start configuring it for AllStarLink.
The first thing you need to do is login to the raspi via SSH and then become root user using sudo as shown below:
sudo su -Once you are root user, you need to add the AllStarLink repo to the sources file and update the operating system using the following command:
curl -s http://apt.allstarlink.org/repos/repo_signing.key | apt-key add
apt update --allow-releaseinfo-change
apt dist-upgradeCopy and paste each line one at a time into your terminal. Once the last command finishes, the system is up to date and can be rebooted as follows:
rebootOnce the raspi has rebooted, login again via SSH as user repeater and then become root user again.
You now need to install a couple of Python components that are required by the system to function. Use the commands below as user root:
apt-get install python3-dev python3-pip
pip3 install pyserialNext you need to change directory into the asterisk config file directory using the command shown below:
cd /etc/asteriskIn this directory you will find all the default config files that come as part of the distro. For this build we’re not going to use them and so we need to move them out of the way ready for a set of config files that have already been configured correctly.
Using the following commands create a new directory, move into that new directory and then move all the unwanted configuration files into it:
mkdir ORIGINAL-CONF-FILES
cd ./ORIGINAL-CONF-FILES
mv ../*.conf ./
ls -la
cd ../You should now be back in the /etc/asterisk directory which will now be empty apart from the custom directory which we left in place.
You now need to copy the correctly configured configuration files into the /etc/asterisk directory. Start by downloading the zip file containing the new configuration files
Once downloaded, copy the .zip file into the repeater users home directory (/home/repeater) using either scp on the Linux command line or if using Windows you can use the FileZilla Client in SFTP mode using the login details above.
Once you have the .zip file in the repeater user’s home directory you need to copy the file into the /etc/asterisk directory as user root:
cp /home/repeater/AllStarLink-Config-v3.zip /etc/asterisk/Next as user root, change directory into the /etc/asterisk directory and unzip the .zip file:
cd /etc/asterisk
unzip ./AllStarLink-Config-v3.zipOnce the file is unzipped you will have a directory called AllStarLink-Config in the /etc/asterisk directory. You now need to cd into the directory, copy all the files out of it into the /etc/asterisk directory leaving a copy in the AllStarLink-Config directory for future reference:
cd /etc/asterisk/AllStarLink-Config
cp ./* /etc/asterisk
cd /etc/asteriskYou now need to move a couple of files into the repeater users home directory using the following commands:
mv ./SA818-running.py /home/repeater
mv ./gpio /home/repeaterOnce the files have been moved you need to set the correct ownership and privileges on the files using the following commands:
chown -R root:root /etc/asterisk/*.conf
chown repeater:repeater /home/repeater/gpio
chown repeater:repeater /home/repeater/SA818-running.py
chmod 755 /home/repeater/gpio
chmod 755 /home/repeater/SA818-running.pyThe gpio BASH script and configuration details were supplied by Mark, G1INU in the Digital Voice room on the Matrix. It adds the COS light functionality to the setup. The COS light will now light every time the SA818 hears RF on the input.
The next thing you need to do is configure the SA818 radio device in the SHARI. The script I used was originally from https://wiki.fm-funknetz.de/doku.php?id=fm-funknetz:technik:shari-sa818 all I’ve done is change the entries to switch off CTCSS and change the frequency to 438.800Mhz. Configuring the SA818 is done by running the SA818-running.py Python programme that you moved into the repeater user home directory. Making sure you are still user root, run the following commands:
cd /home/repeater
./SA818-running.pyAt this point your SHARI SA818 device will be configured to operate on 438.800Mhz and CTCSS will be disabled.
If you want to change the frequency or enable and set a CTCSS tone to access the node you will need to edit the Python programme using your favourite text editor and change the entries accordingly. Once changed rerun the program as shown above and your SHARI will be reconfigured to your new settings.
Next you need to move the allmon.ini.php file into the correct directory so that it enables access to the Allstar Monitor web page on the device so that you can manage connecting/disconnecting nodes. Use the following commands as user root to achieve this:
cd /etc/asterisk
mv ./allmon.ini.php /var/www/html/allmon2/
chown root:root /var/www/html/allmon2/allmon.ini.php
chmod 644 /var/www/html/allmon2/allmon.ini.phpThe allmon.ini.php file needs to have your node name entered into it to work correctly. As user root, change directory and edit the file using your favourite editor.
cd /var/www/html/allmon2Using your text editor, search for the line starting [XXXXX] and change the XXXXX to your node number. Save the change and exit the file.
At this point you are almost complete, all that is left to do is add your node number and node secret into the appropriate configuration files in the /etc/asterisk directory.
Since I am a Linux command line junkie I use vi to edit all the configuration files on the command line as user root, but you can use any editor of your choice.
cd /etc/asteriskStart with the extensions.conf file. Search for the line starting with NODE = and delete the XXXXX entry and insert your node number. Save the file and exit it.
Next you need to edit the iax.conf file. This time search for the line starting with
register= and change the XXXXX for your node number and the YYYYYYYYYYYY for your node secret. Be careful not to accidentally delete any other characters in the lines otherwise it will corrupt the configuration file.
In the same file search for the two lines that start with secret = and change the YYYYYYYYYYYY for your node secret. Once you have changed both of the secret entries, save and exit the file.
The final file to edit is the rpt.conf file. Once again open the file using your favourite editor and search for the line starting with XXXXX = radio@127.0.0.1:4569/XXXXX, change the XXXXX entries for your node number making sure not to delete any other characters next to the XXXXX entries.
Further down in the same file there is a line that starts with [XXXXX], once again change the XXXXX for your node number making sure to keep the square brackets at each end of the node number as you edit it.
Finally move down to the very bottom of the file and find the two lines that start with /home/repeater/gpio, once again change the XXXXX entries for your node number.
The final thing to change in the rpt.conf file is to replace my callsign with your own callsign so that the node identifies itself correctly. Scroll through the file until you find the two lines shown below, delete M0AWS and add your own callsign instead making sure you keep all the spaces between words as shown below.
idrecording = |i DE M0AWS
idtalkover = |i DE M0AWSOnce this is done, save and exit the file. At this point your node should be fully configured and will only require a reboot to get it working.
As user root, reboot your raspi using the reboot command.
rebootOnce your raspi comes back online, login using SSH as user repeater and then become root user using the sudo command detailed above.
You now need to create the admin user password for the Allstar Monitor web page on the device. This is done using the following commands as user root:
cd /var/www/html/allmon2
htpasswd -c .htpasswd adminYou will be asked to enter a password twice for the admin user. Make sure you make a note of this user/password as you will need it to login to the web page.
Finally check that the controlpanel.ini.php file is in the /var/www/html/allmon2 directory:
ls -la /var/www/html/allmon2/controlpanel.ini.phpIf the file isn’t shown in the directory, enter the following commands to create the file in the correct place as user root and then exit the SSH session:
cd /var/www/html/allmon2
cp ./controlpanel.ini.txt ./controlpanel.ini.php
cd
exitOnce this is done your configuration is complete, logout from the terminal session by entering exit once more and your SSH session will terminate.
Using your favourite web browser enter the IP Address of your raspi into the URL bar as shown below:
http://<Your-Raspi-IP>/allmon2Note: remove the <> from the URL once you have entered the required information.
Once this is done you should be presented with your node control panel as shown below.
Login using Admin and the password you set above and you are now ready to start using your node.
It’s a good idea to connect to node 55553 which is a parrot test node to check your audio levels. You can do this by entering the node into the field at the top left and pressing the connect button.
Once connected, tune your radio to 438.800Mhz FM and transmit a test message using your callsign and test123, or something similar. The parrot will then play your recording back to you so that you can hear how you sound. It will also comment on your audio level as to whether it is OK or not.
You are now connected to AllStarLink network and have the world at your finger tips. Below is a small list of nodes in the UK, Australia and America to get you started chatting with other HAMs via your node.
57881 Matrix HAM Radio Space AllStarLink Node (Hosted by Dk1MI)
55553 ASL Parrot for testing
41522 M0HOY HUBNet Manchester, UK
60349 VK6CIA 439.275 Perth, Western Australia
51077 VK6SEG South West Hub B Albany WA
2167 M0JKT FreeSTAR UK HUB 2 freestar.network
53573 NWAG NW AllStar Group Lancashire, UK
27339 East Coast Hub Wilmington NC USAThanks to Michael, DK1MI for building and hosting the Matrix HAM Radio Space AllStarLink Node (57881) and getting us all started in the world of AllStarLink!
We hope to be having regular Matrix Net’s on the node soon for all Matrix members and visitors. We’ll organise days/times via the Digital Voice room.
More soon …
Following on from my article about my QO-100 Satellite Ground Station Complete Build, this article goes into some detail on the Node-RED section of the build and how I put together my QO-100 Satellite Ground Station Dashboard web app.
The Node-RED project has grown organically as I used the QO-100 satellite over time. Initially this started out as a simple project to synchronise the transmit and receive VFO’s so that the SDR receiver always tracked the IC-705 transmitter.
Over time I added more and more functionality until the QO-100 Ground Station Dashboard became the beast it is today.
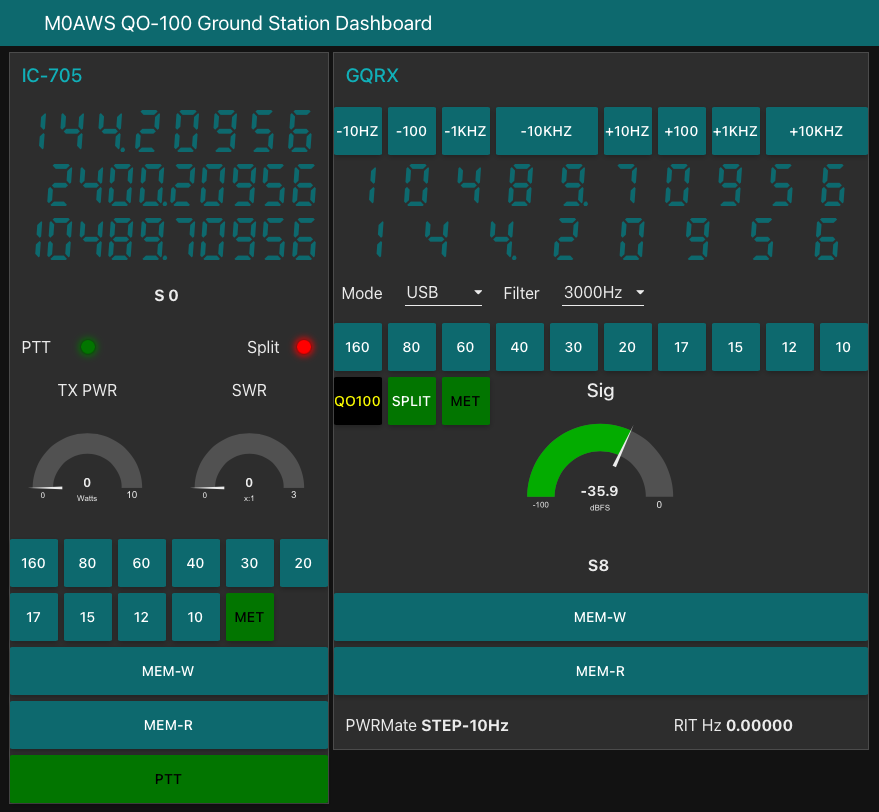
Looking at the dashboard web app it looks relatively simple in that it reflects a lot of the functionality that the two radio devices already have in their own rights however, bringing this together is actually more complicated than it first appears.
Starting at the beginning I use FLRig to connect to the IC-705. The connection can be via USB or LAN/Wifi, it makes no difference. Node-RED gains CAT control of the IC-705 via XMLRPC on port 12345 to FLRig.
To control the SDR receiver I use GQRX SDR software and connect to it using RIGCTL on GQRX port 7356 from Node-RED. These two methods of connectivity work well and enables full control of the two radios.
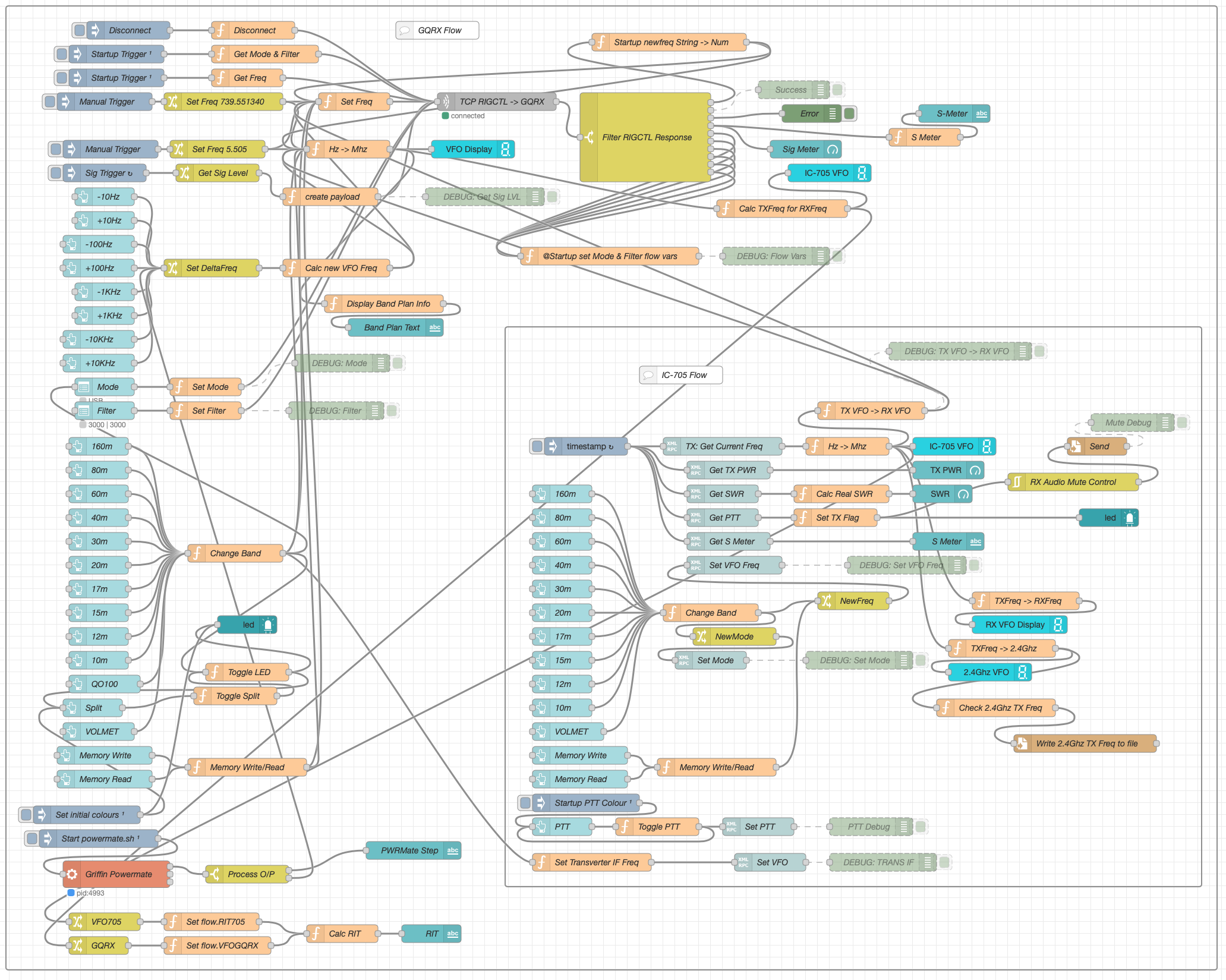
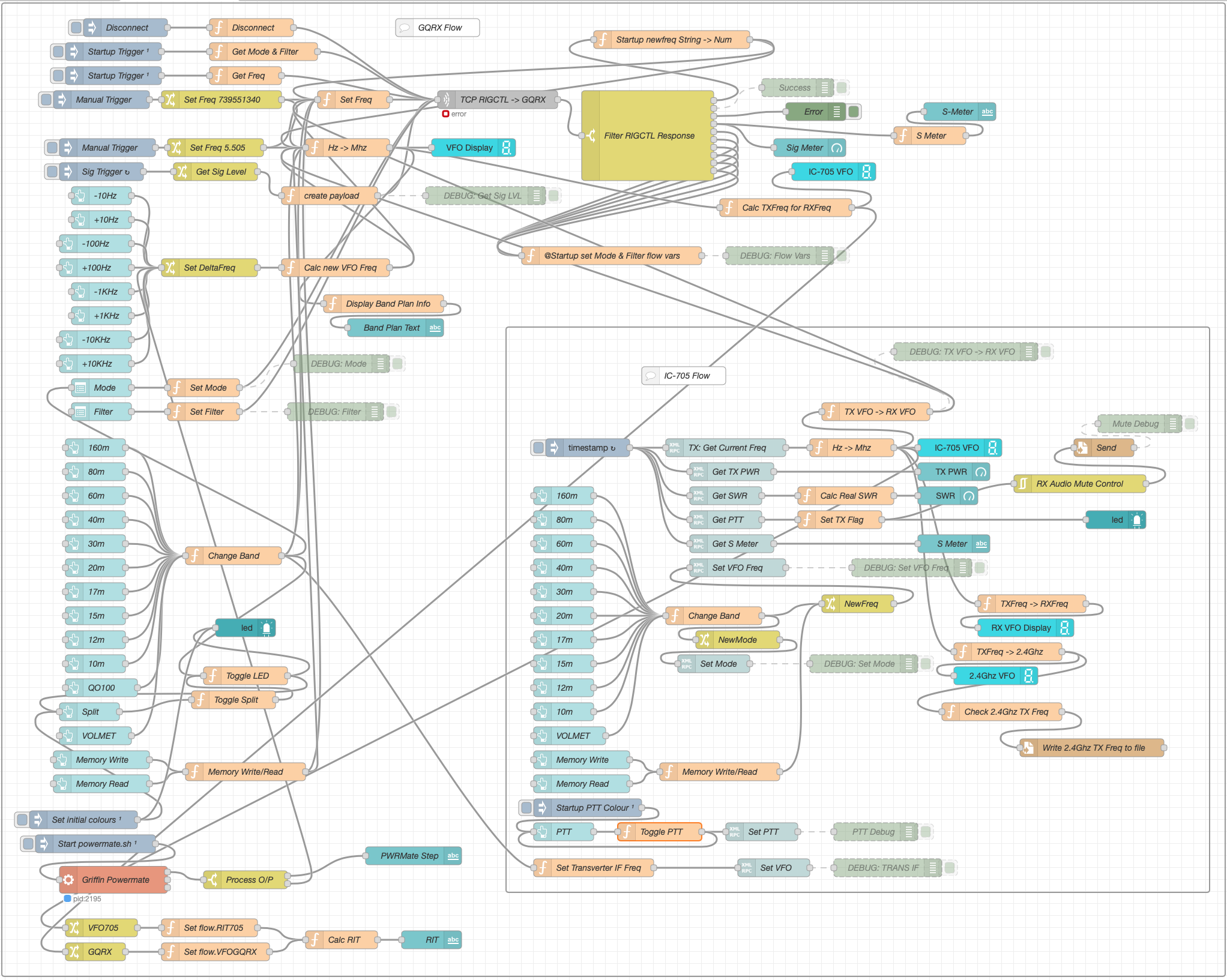
The complete flow above looks rather daunting initially however, breaking it down into its constituent parts makes it much easier to understand.
There are two sections to the flow, the GQRX control which is the more complex of the two flows and the comparatively simple IC-705 section of the flow. These two flows could be broken down further into smaller flows and spread across multiple projects using inter-flow links however, I found it much easier from a debug point of view to have the entire flow in one Node-RED project.
Breaking down the flow further the GQRX startup section (shown below) establishes communication with the GQRX SDR software via TCP/IP and gets the initial mode and filter settings from the SDR software. This information is then used to populate the dashboard web app.
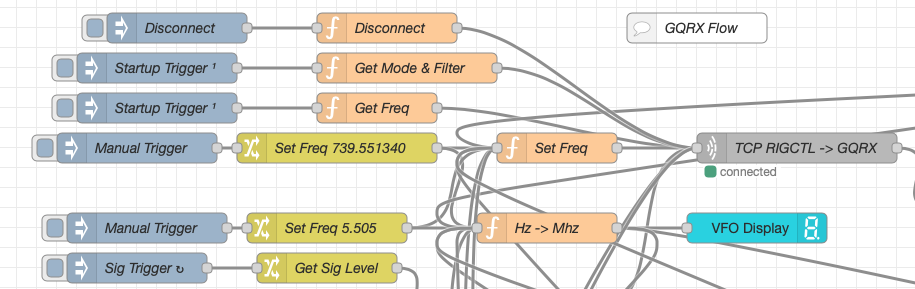
The startup triggers fire just once at initial startup of Node-RED so it’s important that the SDR device is plugged into the PC at boot time.
All the startup triggers feed information into the RIGCTL section of the GQRX flow. This section of the flow (shown below) passes all the commands onto the GQRX SDR software to control the SDR receiver.
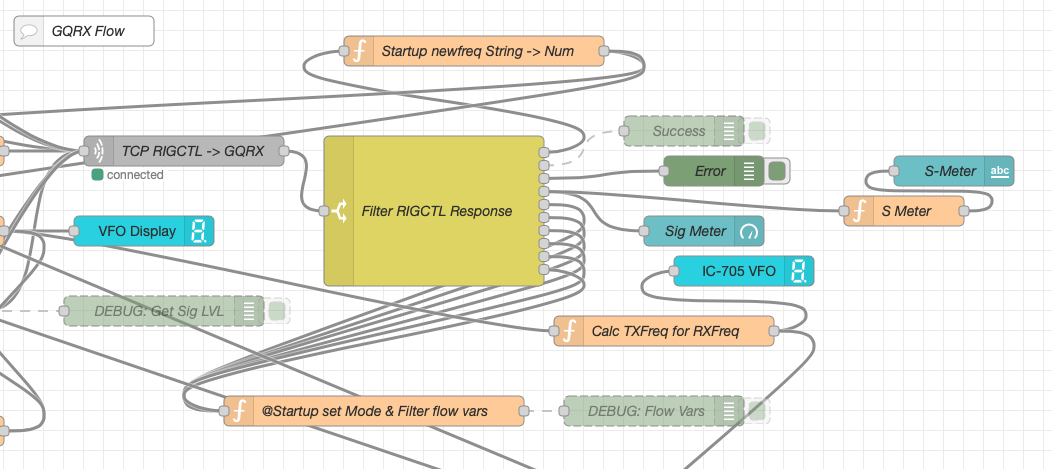
The TCP RIGCTL -> GQRX node is a standard TCP Request node that is configured to talk to the GQRX software on the defined IP Address and Port as configured in the GQRX setup. The output from this node then goes into the Filter RIGCTL Response node that processes the corresponding reply from GQRX for each message sent to it. Errors are trapped in the green Debug node and can be used for debugging.
The receive S Meter is also driven from the the output of the Filter RIGCTL Response node and passed onto the S Meter function for formatting before being passed through to the actual gauge on the dashboard.
Continuing down the left hand side of the flow we move into the section where all the GQRX controls are defined.
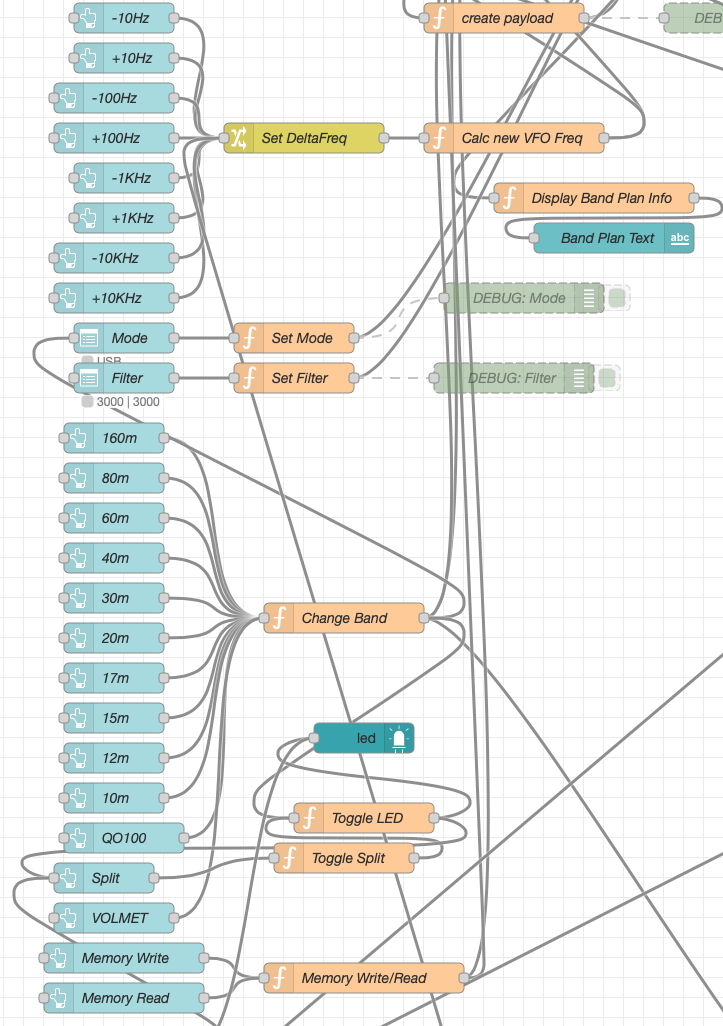
In this section we have the VFO step buttons that move the VFO up/down in steps of 10Hz to 10Khz. Each button press generates a value that is passed onto the Set DeltaFreq change node and then on to the Calc new VFO Freq function. From here the new VFO frequency is stored and passed onto the communications channel to send the new VFO frequency to the GQRX software.
The Mode and Filter nodes are simple drop down menus with predefined values that are used to change the mode and receive filter width of the SDR receiver.
Below are the HAM band selector buttons, each of these will use a similar process as detailed above to change the VFO frequency to a preset value on each of the HAM HF Bands.
The QO-100 button puts the transmit and receive VFO’s into synchro-mode so that the receive VFO follows the transmit VFO. It also sets the correct frequency in the 739Mhz band for the downlink from the LNB in GQRX SDR software and sets the IC-705 to the correct frequency in the 2m VHF HAM band to drive the 2.4Ghz up-converter.
The Split button allows the receive VFO to be moved away from the transmit VFO for split operation when in QO-100 mode. This allows for the receive VFO to be moved away so that you can RIT into slightly off frequency stations or to work split when working DXpedition stations.
The bottom two Memory buttons allow you to store the current receive frequency into a memory for later recall.
At the top right of this section of the flow there is a Display Band Plan Info function, this displays the band plan information for the QO-100 satellite in a small display field on the Dashboard as you tune across the transponder. Currently it only displays information for the satellite, at some point in the future I will add the necessary code to display band plan information for the HF bands too.
The final section of the GQRX flow (shown below) sets the initial button colours and starts the Powermate USB VFO knob flow. I’ve already written a detailed article on how this works here but, for completeness it is triggered a few seconds after startup (to allow the USB device to be found) and then starts the BASH script that is used to communicate with the USB device. The output of this is processed and passed back into the VFO control part of the flow so that the receive VFO can be manually altered when in split mode or in non-QO-100 mode.
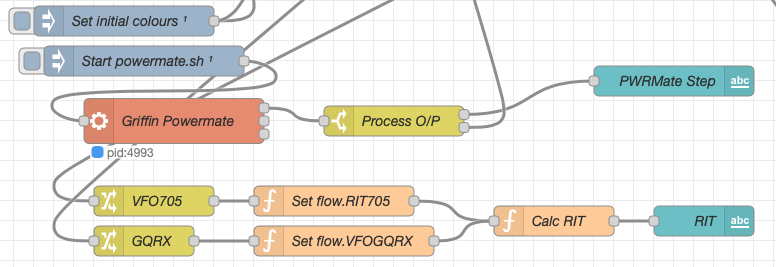
The bottom flows in the image above set some flow variables that are used throughout the flow and then calculates and sets the RIT value on the dashboard display.
The final section of the flow is the IC-705 control flow. This is a relatively simple flow that is used to both send and receive data to/from the IC-705, process it and pass it on to the other parts of the flow as required.
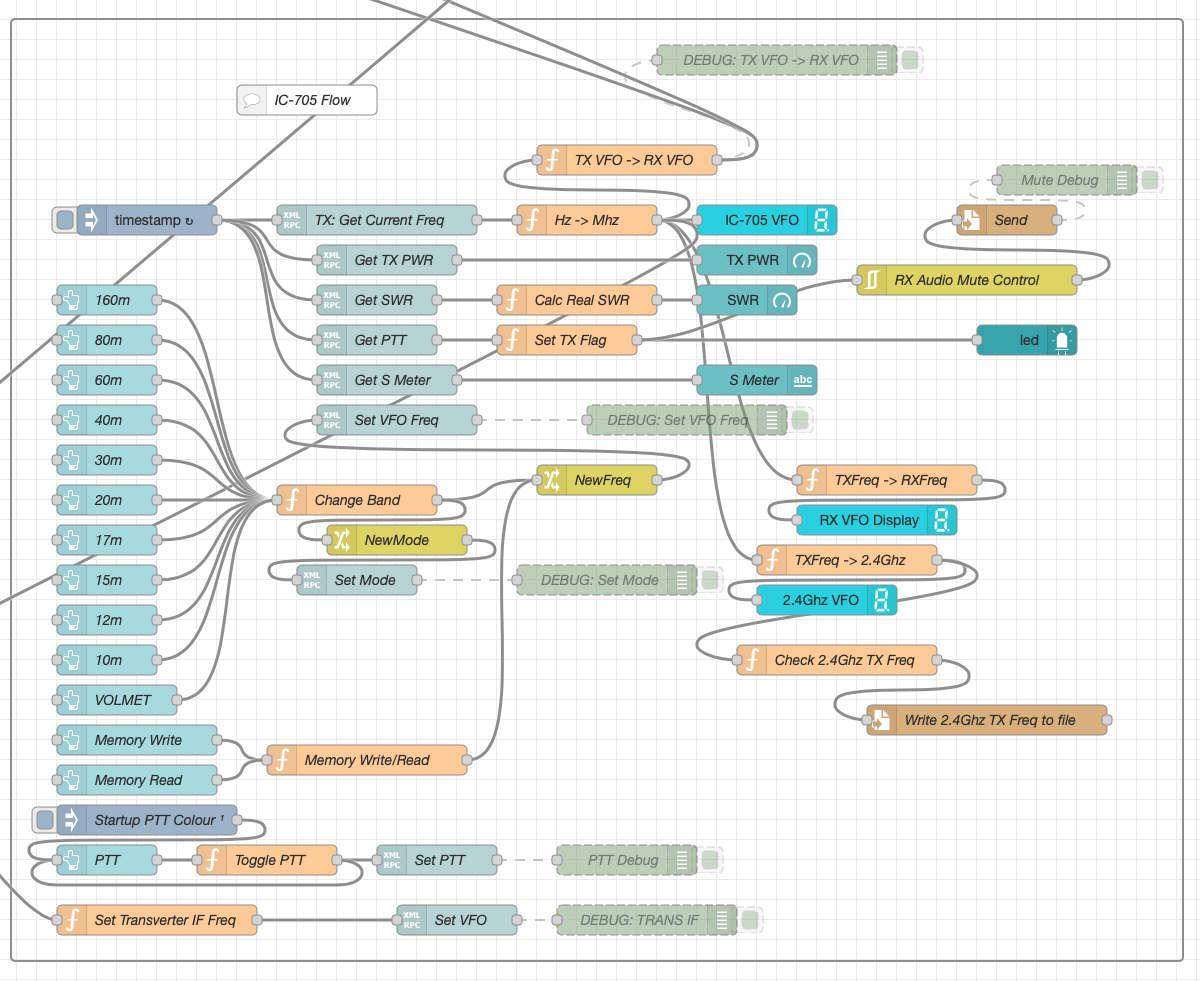
The IC-705 flow is started via the timestamp trigger at the top left. This node is nothing more than a trigger that fires every 0.5 seconds so that the dashboard display is updated in near realtime. The flow is pretty self explanatory, in that it collects the current frequency, transmit power, SWR reading, PTT on/off status and S Meter reading each time it is triggered. This information is then processed and used to keep the dashboard display up to date and to provide VFO tracking information to the GQRX receive flow.
On the left are the buttons to change band on the IC-705 along with a button to tune to the VOLEMT on the 60m band. Once again there two memory buttons to save and recall the IC-705 VFO frequency.
The Startup PTT Colour trigger node sets the PTT button to green on startup. The PTT button changes to red during transmit and is controlled via the Toggle PTT function.
At the very bottom of the flow is the set transverter IF Freq function, this sets the IC-705 to a preselected frequency in the 2m HAM band when the dashboard is switched into QO-100 mode by pressing the QO-100 button.
On the right of the flow there is a standard file write node that writes the 2.4Ghz QO-100 uplink frequency each time it changes into a file that is used by my own logging software to add the uplink frequency into my log entries automatically. (Yes I wrote my own logging software!)
The RX Audio Mute Control filter node is used to reduce the receive volume during transmit when in QO-100 full duplex mode otherwise, the operator can get tongue tied hearing their own voice 250ms after they’ve spoken coming back from the satellite. This uses the pulse audio system found on the Linux platform. The audio is reduced to a level whereby it makes it much easier to talk but, you can still hear enough of your audio to ensure that you have a good, clean signal on the satellite.
As I said at the beginning of this article, this flow has grown organically over the last 12 months and has been a fun project to put together. I’ve had many people ask me how I have created the dashboard and whether they could do the same for their ground station. The simple answer is yes, you can use this flow with any kind of radio as long as it has the ability to be controlled via CAT/USB or TCP/IP using XMLRPC or RIGCTL.
To this end I include below an export of the complete flow that can be imported into your own Node-RED flow editor. You may need to make changes to it for it to work with your radio/SDR but, it shouldn’t take too much to complete. If like me you are using an IC-705 and any kind of SDR controlled by GQRX SDR software then it’s ready to go without any changes at all.
More soon …
I get quite a few emails from readers of my blog asking how my QO-100 satellite station is put together and so, I thought perhaps now is a good time to put together an article detailing the complete build.
My QO-100 satellite ground station is built around my little Icom IC-705 QRP transceiver, it’s a great little rig and is ideal for the purpose of driving a 2.4Ghz transverter/up-converter.
Of course all the software used for the project is Opensource and freely available on the internet.
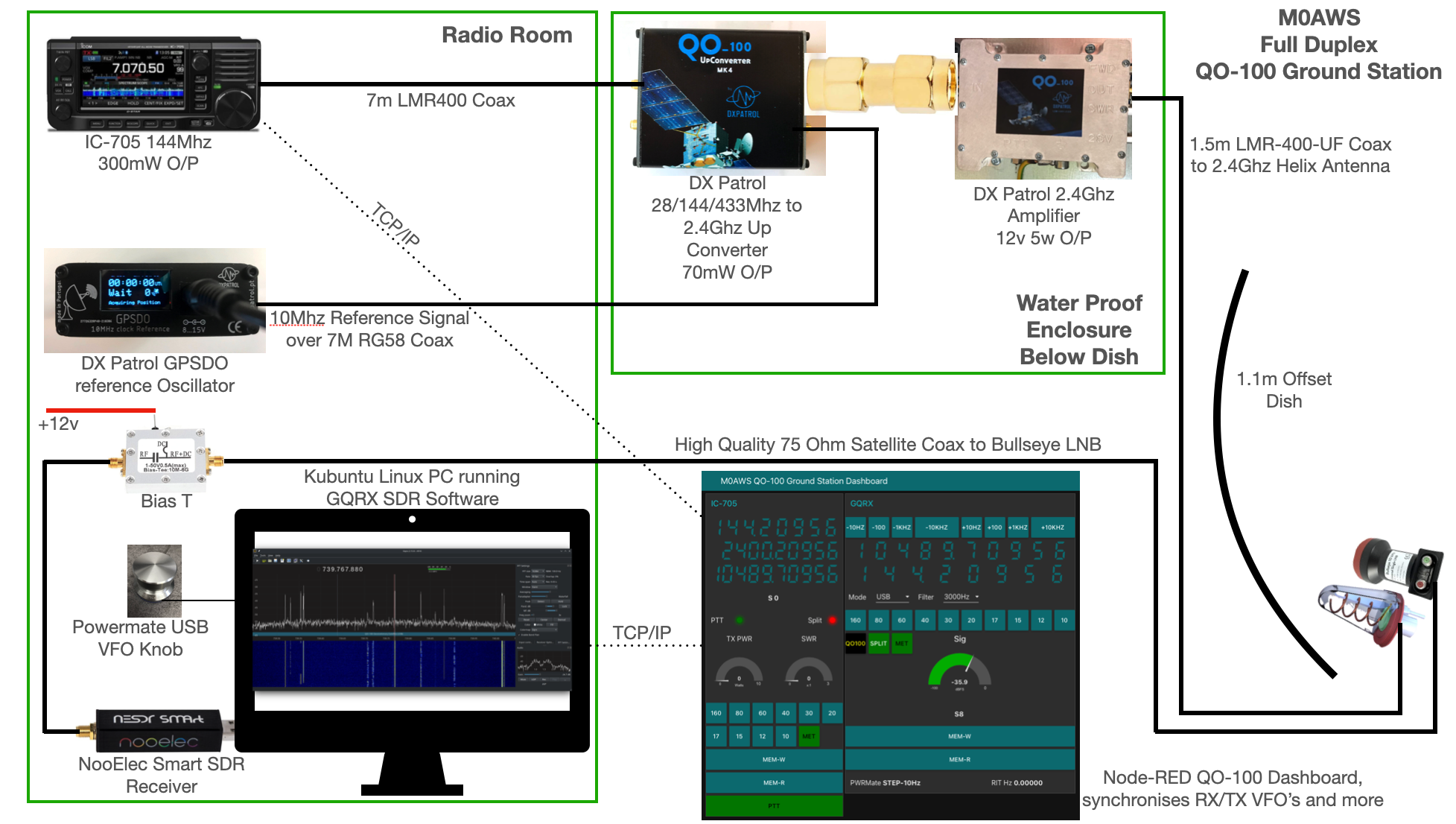
The station comprises of the following building blocks:
To get a good clear view of the QO-100 satellite I have the dish mount 3.2m above the ground. This keeps it well clear of anyone walking past in the garden and beams the signal up at an angle of 26.2 degrees keeping well clear of neighbouring gardens.
The waterproof enclosure below the dish houses all the 2.4Ghz equipment so that the distance between the feed point and the amplifier are kept to a minimum.
The DXPatrol amplifier is spec’d to run at 28v/12w or 12v/5w, I found that running it at 28v produced too much output for the satellite and would cause the LEILA alarm on the satellite to trip constantly. Running the amp at 12v with a maximum of 5w output (average 2.5-3.5w) is more than enough for me to have a 5/9+10 signal on the transponder.
The large 1.1m dish gives me quite an advantage on receive enabling me to hear the very weak stations with ease compared to other stations.
The photo above shows the 2.4Ghz equipment mounted in the waterproof enclosure below the dish. This photo was taken during the initial build phase before I rewired it so, the amplifier is shown connected to the 28v feed. To rewire the amp to 12v was just a matter of removing the 28v converter and connecting the amp directly to the 12v feed instead. This reduced the output from a maximum of 12w down to a maximum of 5w giving a much better (considerate) level on the satellite.
It’s important to keep all interconnects as short as possible as at 2.4Ghz it is very easy to build up a lot of loss between devices.
For the connection from the IC-705 to the 2.4Ghz Up-Converter I used a 7m run of
LMR-400 coax cable. The IC-705 is set to put out just 300mW on 144Mhz up to the 2.4Ghz converter and so it’s important to use a good quality coax cable.
Once again the output from the 2.4Ghz amplifier uses 1.5m of LMR-400-UF coax cable to feed up to the 2.2 turn Icecone Helix Antenna mounted on the dish. This keeps loss to a minimum and is well worth the investment.
The receive path starts with a Bullseye LNB, this is a high gain LNB that is probably one of the best you could use for QO-100 operations. It’s fairly stable frequency wise but, does drift a little in the summer months with the high temperature changes but, overall it really is a very good LNB.
The 12v feed to the LNB is via the coax and is injected by the Bias-T device that is in the radio shack. This 12v feed powers the LNA and associated electronics in the LNB to provide a gain of 50-60dB.
From the Bias-T the coax comes down to the NooElec SmartSDR receiver. This is a really cheap SDR device (<£35 on Amazon) based on the RTL-SDR device but, it works incredibly well. I originally used a Funcube Dongle Pro+ for the receive side however, it really didn’t handle large signals very well and there was a lot of signal ghosting so, I swapped it out for the NooElec SDR and haven’t looked back since.
The NooElec SmartSDR is controlled via the excellent Opensource software GQRX SDR. I’ve been using GQRX SDR for some years now and it’s proven itself to be extremely stable and reliable with support for a good number of SDR devices.
To enhance the operation of the SDR device I have added a Griffin Powermate VFO knob to the build. This is an old USB device that I originally purchased to control my Flex3000 transceiver but, since I sold that many moons ago I decided to use it as a VFO knob in my QO-100 ground station. Details on how I got it working with the station are detailed in this blog article.
Having the need for full duplex operation on the satellite this complicates things when it comes to VFO tracking and general control of the two radios involved in the solution and so I set about creating a QO-100 Dashboard using the great Node-RED graphical programming environment to create a web app that simplifies the management of the entire setup.
The QO-100 Dashboard synchronises the transmit and receive VFO’s, enables split operation so that you can transmit and receive on different frequencies at the same time and a whole host of other things using very little code. Most of the functionality is created using standard Node-RED nodes. More info on Node-RED can be found on the Opensource.radio Wiki or from the menu’s above.
I’ll be publishing an article all about the QO-100 Dashboard in the very near future along with a downloadable flow file.
I’m extremely pleased with how well the ground station works and have had well in excess of 500 QSO’s on the QO-100 satellite over the last last year.
More soon …
Update July 1, 2024. LoTW is back up! It is running slow, but it is available. Thank goodness.
--
When I wrote the article back in May, I hardly thought that LoTW would be down a month later.
Sadly, the outage continues.
My suspicions were correct, however, that this was something more than a simple networking problem. The ARRL has since admitted their network was viciously and uniquely hacked. I can certainly understand their caution to make sure that every system linked to LoTW is given a clean bill of health before turning the system back on.
Earlier this week, on Tuesday there was apparently a brief period of time when LoTW was accessible. A couple of my ham buddies managed to upload some contacts. They'll have to wait for confirmations when the rest of us can get in.
I do hope it is soon. I'm really missing this service.
I wanted to get a programmer for the ID51. So, off to RT Systems as I have some of their programmers already. Got the Mac version of the package for the ID51 but it does not allow programming via SD card. That caught me out because their package for the FT2D does and I wrongly assumed this would too.
Of course, it needs a cable! Off to eBay… an allegedly suitable cable arrived today but the RT Systems program will not find it. Typical, it needs one of their enfangled cables that are incompatible with the rest of the world. No way that will arrive in time for our trip.
So… Chirp then. Downloaded the Mac version but it, too will not see the eBay cable. I know the Mac sees it so why won’t the software? RT Systems has no option to select a USB port, Chirp does but offers no help as to what it is.
Try Linux? Hmmm… I’m really not into fiddling with flatpack or any other enfangled package managers – apt is enough, no apt, no use.
Windows then! Got Chirp, and it can find the cable, and Chirp will see it and will download from the ID51. All good then? Nope!
This exercise was to enable me to program up all the foreign repeaters ready for the trip and also to figure out why our local repeater was in the list incorrectly. So let’s take a step backwards now…
I had tried to update the list of repeaters by downloading from Icom. This method works fine by loading the relevant file onto an SD card and telling the radio to load it. RT Systems take note – why does your FT2D software allow this but the ID51 software does not? This should be standard!
But the resultant list was missing the local repeater. I tried to add it but then the radio tells me there are no repeaters at all. I tried downloading the file from repeaterbook which at least knows about the local repeater. No joy. I tried editing the files already on the radio but each time it somehow messed up. After many attempts and permutations I had to give up which is why I though getting an actual programmer would help.
Enter Chirp (on Windows, yuk…). It downloaded from the radio fine but when I looked at the repeater list it seemed broken – all it had was a list of callsigns and no other information. Ugh! But then I remembered that the radio had whinged that there were no repeaters. So, I loaded a known good repeater list file already omitted the SD card, checked the radio would see repeaters when DR is pressed, and downloaded that from the radio into Chirp. The repeater list is just as broken.
Ok… so I exported everything from Chirp as CSV and opened in LibreOffice. But it does not export the repeater list so I am no further towards understanding how the data works. Time to hit the ‘net. Meanwhile, I checked the current repeater list to see if the ‘Near Repeater’ option was working… nope… 20 minutes in and the radio still has not got a GPS location, just like the FT2D!
Fiddling further with Chirp I found someone had kindly created a list of repeaters that does include our local one. I downloaded this and tried to load it into Chirp but it just says the file format is invalid. I copied it to the SD card and tried to import it into the ID51 – data error. Ok, this has gone far enough, this is not rocket science but it seems that it is made so.
Let’s try Icom’s own software, apparently called cs-51plus2. This is called cloning software and, of course is for Windows. After installing the software it read the ID51 ok. I found the repeater list under ‘Digital’ and, indeed, the local repeater is missing. The big question is, can I add it? Ok, I added the local repeater to the end of the list of repeaters, adding the frequency and offset, plus coordinates. Coordinates are degrees, minutes and seconds but I had digital so had to convert – not a biggie. Wrote the data back to the radio and rebooted. And… the repeater is there! And it keys! Just had to wait for the radio to find the GPS – I reckon it does this by carrier pigeon – but finally the ‘Near Repeater’ function works and also finds the newly-added local repeater. Now to add the foreign ones…
So what is the takeaway from all of this? I wasted money on RT Systems software by assuming it would work the same as the FT2D software i.e. use the SD card. Never mind. I tried Chirp but that just confused the issue. And the manufacturer’s own software, generally looked down on, worked fine! (Apparently the software comes with the radio, I don’t remember it having a CD and there is no sign of it but I downloaded it from Icom just fine). I must remind myself if I ever get another radio to first try the manufacturer’s software as my needs are generally lightweight, otherwise try Chirp, and last get the RT Systems software after making sure (by which I mean email them as it is very muddled reading the literature) whether it needs their special cable – and, personally, if it does then I won’t buy the software. I mean, come on, I pay for the software and I am forced to buy a lead I’ll probably only use once or twice?
May 16th, there was an issue with Logbook of The World (LoTW). I could not load the main page at all -- receiving an error indicating the server wasn't responding.
That's pretty normal stuff, actually. There are dozens of problems that can result in this kind of error, so I wasn't surprised. I figured the ARRL staff would address it quickly. But, after much of the day, I was still getting the error.
So, I sent a message to lotw-help@arrl.org, informing them that the web site wasn't responding, kindly asking when they expected it to be back up. I mentioned I was surprised there was no notice of the outage on the ARRL.org web site.
Later that day, the ARRL put up a notice that there was a service disruption involving access to the network, and that it affected LoTW and the ARRL Learning Center. They even updated it the next day, addressing concerns users had over information privacy.
But then, nothing happened. Not until May 22nd, when they updated the notice without really adding any information.
Now, part of this delay may be due to the fact that much of the ARRL staff were all out at the Xenia Hamvention. But, that was a week ago.
What gives? Sure, networking problems. Honestly, though, as a computer professional, networking problems generally don't take more than a week to solve. I'm beginning to suspect there's something more than the ARRL hasn't told us, but I can't be sure.
I'm really missing access to LoTW. In the last 20 years, it has really become central in my enjoyment of the hobby. I do hope I'm wrong, and that ARRL manages to fix this problem soon.
Ever since my QO-100 ground station has been operational I’ve been using my NodeRed QO-100 Dashboard to control my IC-705 and GQRX SDR software to drive my NooElec SmartSDR receiver. This gives me a full duplex ground station with both transmit and receive VFO’s synchronised.
This solution has worked incredibly well from the outset and over time I’ve added extra functionality that I’ve found to be useful to enhance the overall setup.
The latest addition to the ground station solution is a Sennheiser Headset that I picked up for just £56 on Amazon (Much cheaper than the Heil equivalents at the HAM stores!) and have found it to be excellent. The audio quality from both the mic and the headphones is extremely good whilst being light and comfortable to wear for extended periods.
To incorporate this into the ground station the headset is connected to my Kubuntu PC and the audio chain to the IC-705 is sent wirelessly using the latest version of WFView. This works extremely well. The receive audio comes directly from the GQRX SDR software to the headphones so that I have a full duplex headset combination.
Audio routing is done via pulse audio on the Kubuntu PC and is very easy to setup.
Since I no longer have a mic connected to the IC-705 directly I found that I needed a way to operate the PTT wirelessly and this is where the latest addition to my NodeRed QO-100 Dashboard comes in.
Adding a little functionality to the NodeRed flow I was able to create a button that toggles the IC-705 PTT state on and off giving me the ability to easily switch between receive and transmit using a simple XMLRPC node without the need for a physical PTT button.
The PTT state and PTT button colour change is handled by the Toggle PTT function node shown in the above flow. The code to do this is relatively simple as shown below.
The entire QO-100 Dashboard flow has grown somewhat from it’s initial conception but, it provides all the functionality that I require to operate a full duplex station on the QO-100 satellite.
This simple but, effective PTT solution works great and leaves me hands free whilst talking on the satellite or the HF bands when using the IC-705. This also means that when using my IC-705 it only requires the coax to be connected, everything else is done via Wifi keeping things nice and tidy in the radio shack.
The image above shows the QO-100 ground station in receive cycle with the RX/TX VFO’s in split mode as the DX station was slightly off frequency to me. The PTT button goes red when in TX mode just like the split button shown above for visual reference.
As you can probably tell, I’m a huge fan of NodeRed and have put together quite a few projects using it, including my HF Bands Live Monitoring web page.
More soon …
In 1984, I was working at Hayes Microcomputer Products. They were the premiere modem manufacturer for small computers, back in the days when modems over telephone lines were a primary means of computer to computer and user to computer communications.
In my job, I created communications software to talk to the modems. The software dialed the modem, established connection, provided terminal emulation (my specialty), allowed for the capture of the data stream to files, printing, file transfer with the remote computer (using protocols like XMODEM and YMODEM), and other features.
These were the early days of personal computing. IBM introduced the PC in 1981, and it had rapidly evolved into a defacto standard computer, shoving out various CP/M designs from the previous decade. Personal computers were so new, people were trying to figure out what to do with them. Word processing, spreadsheets and other office applications had just been introduced.
Hayes was trying to stay at the forefront. We had a laboratory filled with pretty much one of every personal computer, and when new ones came out, we would buy one. In late 1983, we got an Apple Lisa. It was a very different kind of computing experience. It was a curiosity to us, and as there was no programming environment available, we didn't see how we could build software to talk to a modem. Plus, at the price point, there were few buyers.
We were soon green lighted to create a product for the Macintosh.