CMRR and transmitting antennas
Since the widespread takeup of the NanoVNA, a measure of performance proposed by (Skelton 2010) has become very popular.
His measure, Common Mode Rejection Ratio (CMRR), is an adaptation of a measure used in other fields, he states that he thinks the application of it in the context of antenna systems and baluns is novel and that “CMRR should be the key figure of merit”.
Skelton talks of different ways to measure CMRR, but essentially CMRR is a measure of the magnitude of gain (|s21|) from Port 1 to Port 2 in common mode, with the common mode choke (or balun) in series from the inner pin of Port 1 to the inner pin of Port 2.
Note that this is the same connection as used for series through impedance measurement, but calculation of impedance depends on the complex value s21.

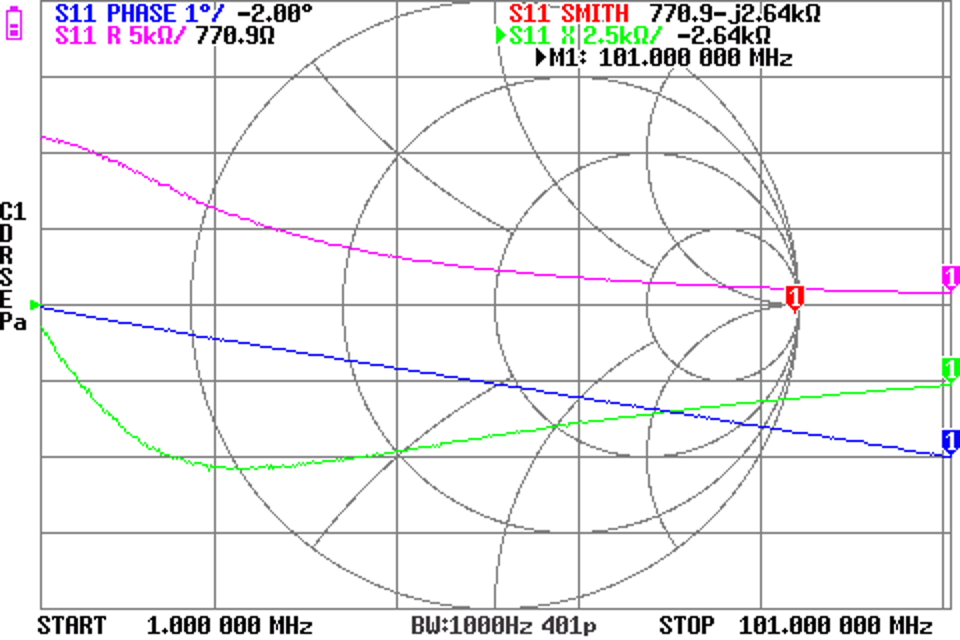
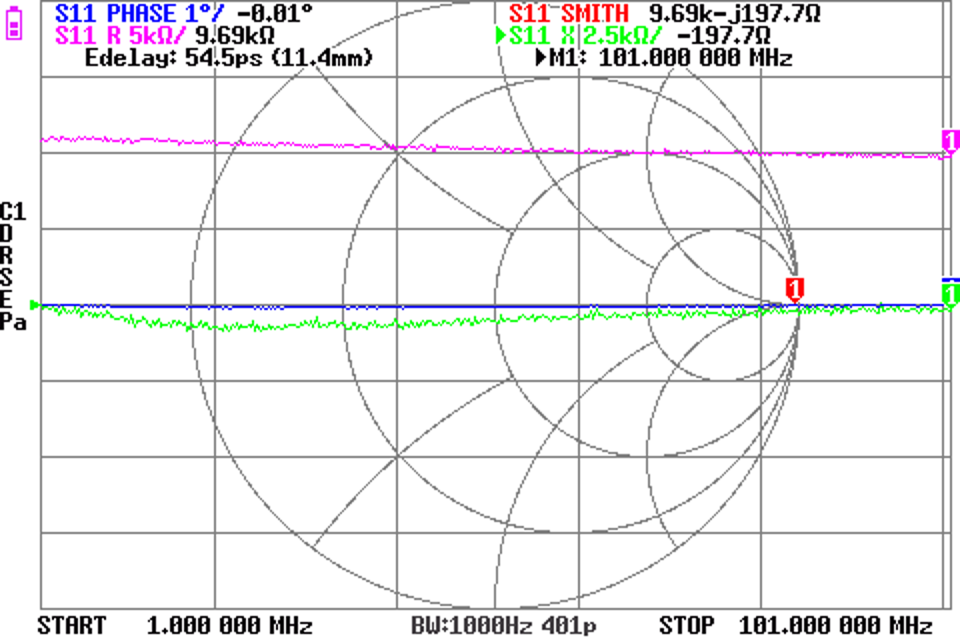
Above is capture of a measurement of a Guanella 1:1 common mode choke or balun. The red curve is |s21|, the blue and green curves are R and X components of the choke impedance Zcm calculated from s21.
Matched vs mismatched DUT
Case 1: impedance matched DUT
In this type of test, the DUT between Port 1 and Port 2 is a good match to both Port 1 and Port 2.
Lots of readers will understand that if they connected a long piece of 50Ω coax between Port 1 and Port 2, and measured |s21|=-6dB, that it is reasonable to say that the cable appears to have an attenuation or loss of 6dB for that length. Further, that the current into Port 2 is exactly half of that out of Port 1… the current has been “attenuated”.
If the DUT is deployed in another matched scenario, you would expect to observe similar behavior, including attenuation.
Case 2: impedance mismatched DUT
In this type of test, the DUT between Port 1 and Port 2 is not a good match to both Port 1 and Port 2.
For example, the matched DUT case does not apply if you made an electrically short connection between ports using a series resistor, the current from Port 1 to Port 2 is approximately uniform. If the DUT is a electrically short inductor, capacitor resistor, or combination with only two terminals, one connected to Port 1 inner and the other connected to Port 2 inner, the same thing applies, the current into Port 2 is approximately equal to the current out of Port 1, the current has NOT been “attenuated”.
If the DUT is deployed in another undefined mismatched scenario, you should not expect to predict behavior based on the simple |s21| measurement.
Interpretation of the |s21| plot above
The widespread interpretation of |s21| for the balun test described above is that it is a plot of the common mode current attenuation property of the balun.
That is deeply flawed, very popular, but deeply flawed. The measurement is of the type discussed under Case 2 above, and the two terminal DUT does not possess some intrinsic attenuation property independent of its measurement context.
Interpretation of the plotted series through R,X derived from the complex s21 measurement, so-called series through s21 impedance measurement
It is popularly held that it is valid to measure common mode impedance (Zcm) by this technique, superior even by many authors… but let’s stay with valid for the moment.
The calculation of series through impedance from s21 depends on an assumption that the current into Port 2 is exactly equal to that out of Port 1, there must NOT be any reduction or attenuation of current in the test setup, otherwise the results are invalid.
Properly executed, this IS a valid technique for measuring Zcm… and one of the necessary conditions is that there is no reduction in current from Port 1 to Port 2.
So, you cannot accept the common technique for series through s21 impedance measurement and at the same time entertain the concept of a matched attenuator DUT.
Bringing it all together
Let’s explore the system response using three terminal measurement of the antenna system impedance and the balun measured above.
Working a common mode scenario – VK2OMD – voltage balun solution reports a three terminal impedance measurement of an antenna system at 3.6MHz.
This following presents calculation of some interesting balun / drive scenarios based on those measurements and Zcm of the balun reported above, and repeated here for convenience.
Above, an identical balun was measured to find |s21| of the balun in common mode. Also shown is the s21 series through measurement of Zcm.
The oft touted CMRR is + or – |s21|, depending on the author and their self defining measurement. Let’s take Skelton’s definition and call CMRR for this balun 29.4dB.
Let’s list the key configuration parameters:
- frequency=3.6MHz;
- drive voltages V1 and V2 are not perfectly balanced as detailed in the table below;
- other key parameters are listed in the table.
![]()
Above is a table showing for each configuration, the magnitude of the total common mode current |2Ic|, |2Ic| relative to the No balun baseline configuration, differential current |Id|, and |2Ic/Id| as a percentage.
Note that these currents are potentially standing waves, and they are measured at the antenna entrance panel, about 11 m of two wire feed line from the dipole feed point.
You might ask in respect of the total common mode current:
- is the no balun result surprising?
- is the current balun performance surprising?
- is the voltage balun performance surprising?
- does the measured CMRR of 29.2dB imply the reduction in common mode current due to the current balun of 24.3dB?
- what does the measured CMRR infer?
- can the CMRR be used in an NEC model of the system scenario?
- can Zcm be used in an NEC model of the system scenario?
References
- Agilent. Feb 2009. Impedance Measurement 5989-9887EN.
- Agilent. Jul 2001. Advanced impedance measurement capability of the RF I-V method compared to the network analysis method 5988-0728EN.
- Anaren. May 2005. Measurement Techniques for Baluns.
- Skelton, R. Nov 2010. Measuring HF balun performance in QEX Nov 2010.