I’m Twitch-y!
Last night, I worked Luis, EA1TG, and this morning, he sent me a link to a video on Twitch that he made of our contact. (Click on the image to go to Twitch. For some reason, I couldn’t embed the Twitch video here.)

This is kind of cool. I’ve been thinking of setting up my own Twitch channel to stream my contacts. I’m not sure if anyone would actually watch them, but who knows?
Bye-bye X-6100
Last summer, I purchased a Xiegu X-6100 from Radioddity when they put it on sale. I had a lot of fun using it. In some ways, it’s more fun to use than my Elecraft KX-3. I attribute that mainly to the brightly-colored waterfall display.
It’s just not the radio that the KX-3 is, however. For one thing, the KX-3’s antenna tuner is much better than the X-6100’s antenna tuner. The KX-3 tuner almost always achieves an SWR of 1.1:1 or less with my 66-ft. doublet antenna, while the Xiegu is satisfied once it hits 1.5:1. The color choices are also terrible, making it hard to read, especially in bright sunlight.
So, after making 36 contacts with it on my latest POTA activation, I sold the X-6100 last week. I hope that the new owner will have as much fun as did with it. And, find its shortcomings less annoying.
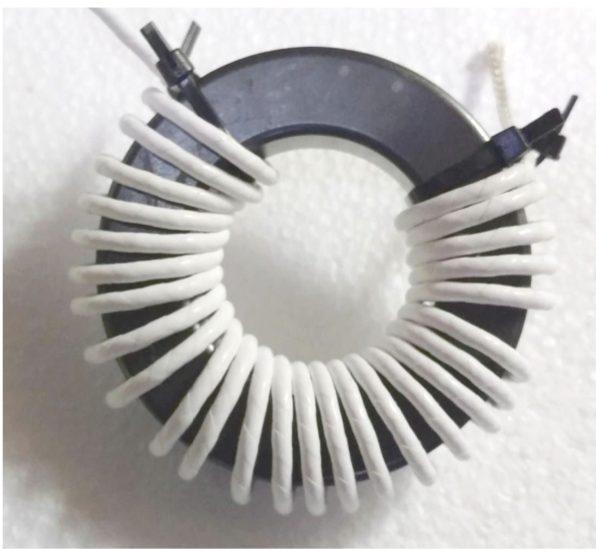
Bring on the toroids!
To replace the X-6100, I purchased a QRP Labs QMX kit. For less than $100, the QMX provides five band coverage (either 80m – 20m or 20m – 10m), CW and digital modes, an SDR receiver, a 24-bit 48 ksps USB sound card, CAT control, and synthesized VFO with TCXO reference. Since I’ll be using this for POTA, and propagation on the higher bands is headed in the right direction, I opted for the 20m – 10 version.
I also purchased the enclosure and power cord, so the price came to just short of $140, including shipping. Even so, that’s quite a deal, I think.
When I told my friends Rick and Paul about my purchase they jumped all over me about the toroids. One of them in particular has a trifilar winding and is supposed to be difficult to fabricate. I’m not a big fan of winding toroids, but I’m not scared of them either. Bring on the toroids!
In the meantime, I’ve been watching this video:
After watching it, it seems to me that the biggest thing to watch out for is how crowded everything is inside the radio. For example, there are several warnings about how close some of the components and traces are to one another. Forewarned is forearmed, though, so at least I’ll know what to look out for.
Stay tuned for reports on how I get along with the kit. Who knows? Maybe I’ll live-stream my toroid-building on my YouTube or Twitch channel.