
 Release Date: September 21, 2024 Here is a summary of the news trending This Week...
Release Date: September 21, 2024 Here is a summary of the news trending This Week...
Reading view
 This is a 1-hour version of the weekly podcast for This Week in Amateur Radio....
This is a 1-hour version of the weekly podcast for This Week in Amateur Radio....
AllStarLink Control Dashboard
Ever since I built my RaspberryPi/SHARI AllStarLink node I’ve had to manage connecting/disconnecting to/from other nodes using the Allmon2 or Supermon web admin interfaces. These work fairly well albeit, a bit clunky and buggy. It’s impossible to use from a mobile device though and so I have to get my Macbook out each time I want to connect/disconnect nodes.
Being a Node-RED fanatic I decided that I should put something together that was more portable, mobile friendly and much easier to use. A simple user interface is all that is required and can be achieved very easily using the standard Node-RED dashboard nodes.
Initially I started investigating the Linux command-line interface for Asterisk, the VOIP system that underpins AllStarLink (ASL). I very quickly discovered that the ASL node can be very easily controlled directly from the command-line and that this would be an ideal interface to use to enable node management via a Node-RED dashboard.
In very little time at all I had an experimental control dashboard working with the ASL node and was able to connect/disconnect to/from a single node. All that was required now was to extend this so that I could connect to a number of nodes with nothing more than a push of a button.
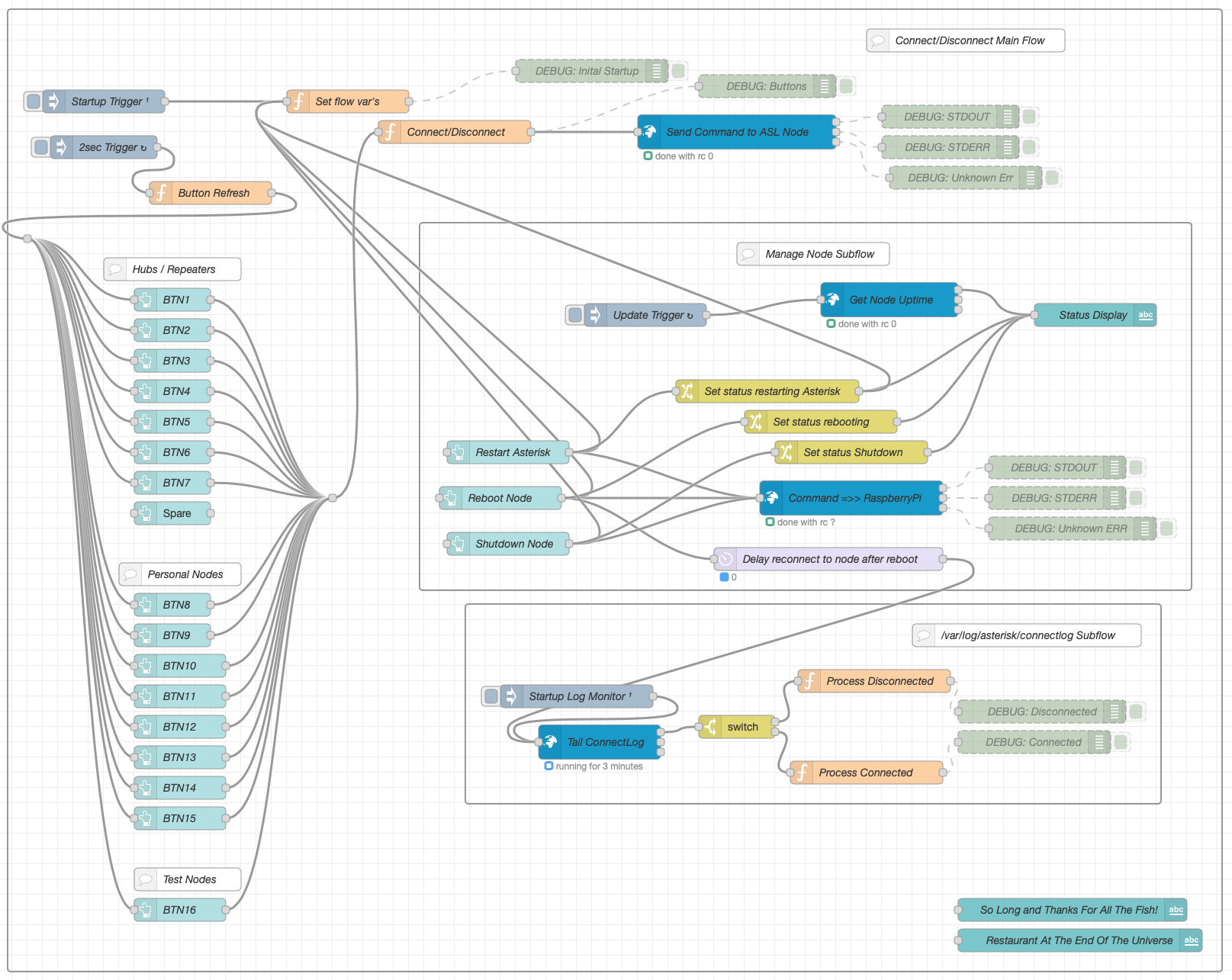
The resultant flow consists of 3 sections, Connect/Disconnect Main Flow, Manage Node Subflow and /var/log/asterisk/connectlog Subflow.
The Connect/Disconnect Main Flow handles all the input from the buttons on the dashboard and the communication to the underlying Asterisk VOIP system.
The button status is denoted by 3 colours, green (Ready to connect), orange (Transitioning to/from connect) and red (Connected). Each button is updated automatically by the button refresh function that is triggered every 2 seconds.
The Manage Node Subflow provides a simple interface to restart the Asterisk VOIP system, reboot the RaspberryPi and shutdown the RaspberryPi. The node status is automatically updated every 45 seconds and will show when the Asterisk subsystem is being restarted or the node is being rebooted or shutdown.
Finally the var/log/asterisk/connectlog Subflow monitors the Asterisk connectlog looking for connect/disconnect messages so that it can signal to update each button status.
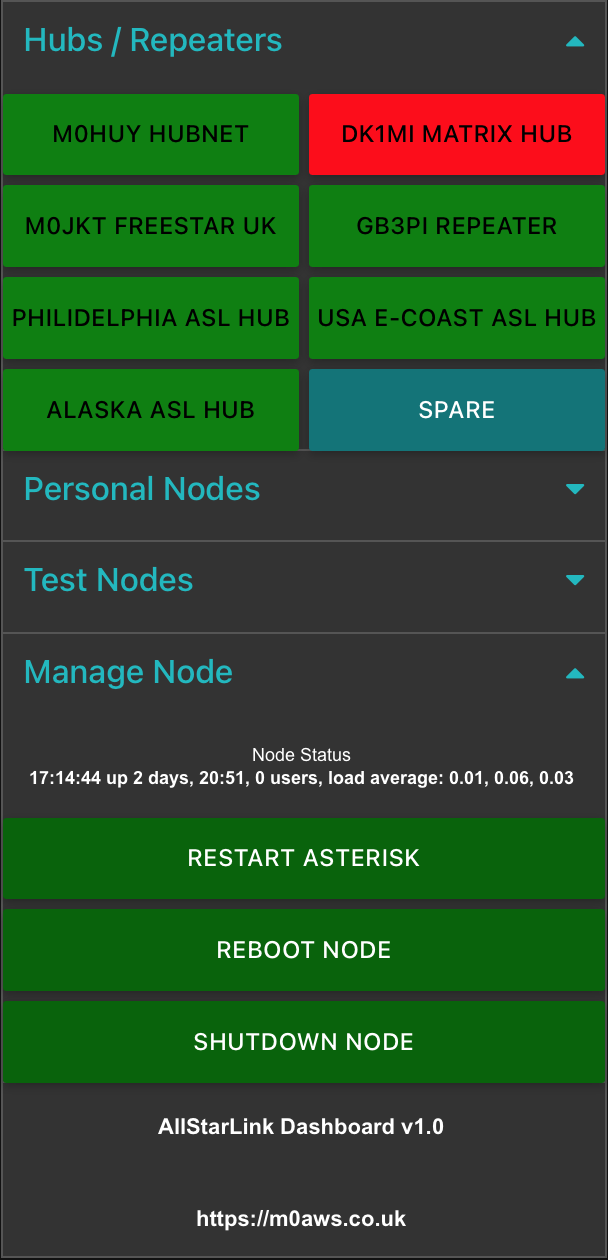
Each section of the dashboard can be collapsed/opened by touching/clicking the little blue arrows on the right of the dashboard. The dashboard works fine on Android, iOS, Windows, MacOS and Linux.
If you’re not familiar with Node-RED and haven’t yet installed it to your PC, take a look at the Node-RED Getting Started Page. The information takes you through installing Node-RED onto a multitude of devices including PC and RaspberryPi devices.
Once you have Node-RED installed all you need to do is download the AllStarLink Control Dashboard Flow and import it to your Node-RED flow editor.
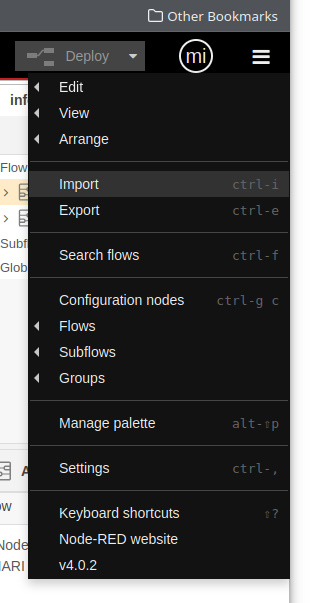
Once downloaded, select Import from the burger menu icon on the right-hand side of the flow editor as shown below and import the flow file.
Once imported you will find that some of the nodes in the flow are not available. This is because you need to add them to the flow editor palette before being able to deploy the flow.
Drop down the same menu as shown above but, this time select Manage Palette. This will open another window where you will need to select the Install tab as shown below.
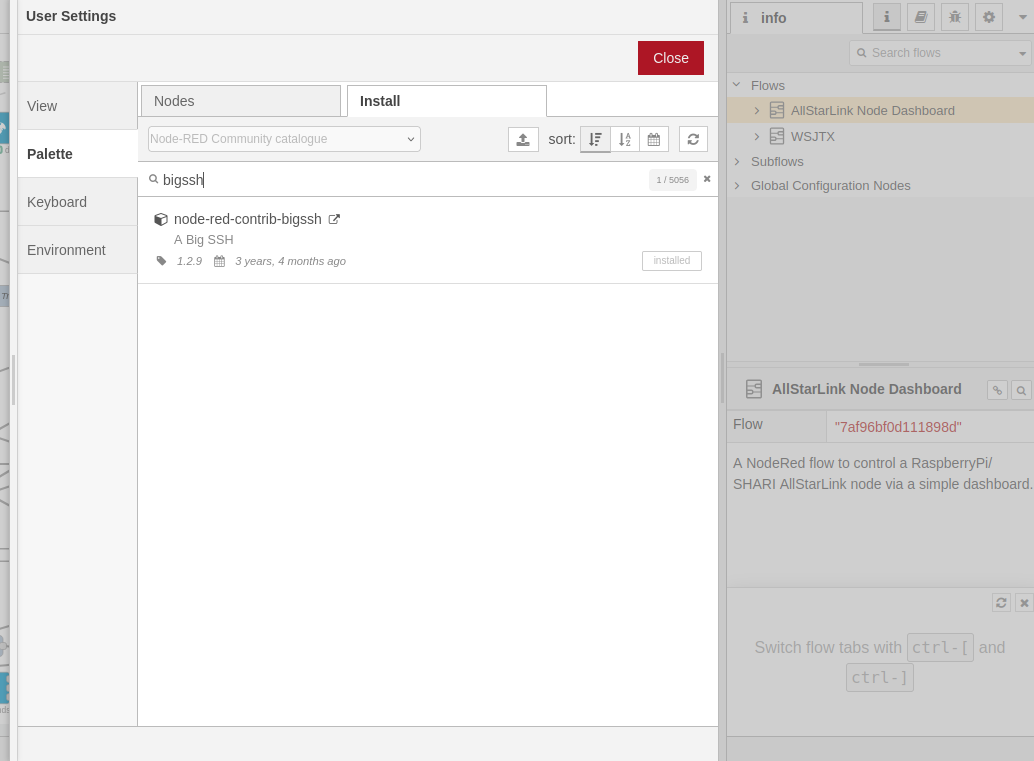
You need to install two node sets to complete the flow, node-red-contrib-bigssh and node-red-dashboard. Type in the name of each package one at a time in the search bar and then click the Install button.
Once the two packages are installed you then need to configure the credentials for logging into your RaspberryPi. This is simply done by double clicking the blue Send Command to ASL node at the top of the main flow and then clicking the Pencil button at the end of the Credentials field. This will open another window where you will need to type in the IP Address of your ASL RaspberryPi into the Host field, then enter 22 into the port field, add repeater into the Username field (repeater is the default username, if you have changed this then you will need to add the new username name in instead) and then the password associated with the repeater login into the Password field. (Normally allstarlink)
Once this is done, do the same on the other blue nodes, namely “Get Node Uptime“, “Command =>> RaspberryPi” and “Tail ConnectLog”.
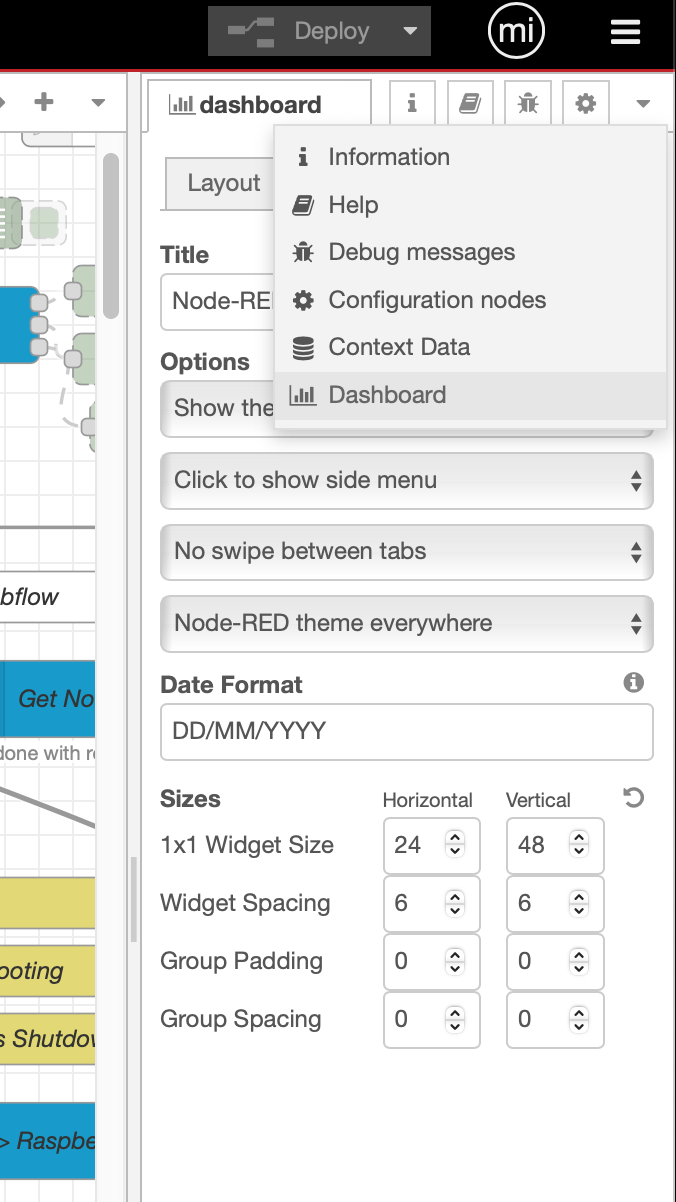
The final thing to setup is the dashboard size. Click on the downward pointing triangle at the top right of the menu bar (under the burger menu) and select dashboard. Check that the sizes are set the same as in the image below. For some reason, these settings aren’t always imported (Possible bug?) so, if your dashboard layout isn’t like shown above it will be because these settings failed to import.
You are now ready to deploy your AllStarLink Control Dashboard!
Press the red Deploy button at the top of the flow editor window.
To access the dashboard from any device, open your favourite web browser and enter the following URL: http://IP-Address-of-Node-RED-Computer:1880/ui
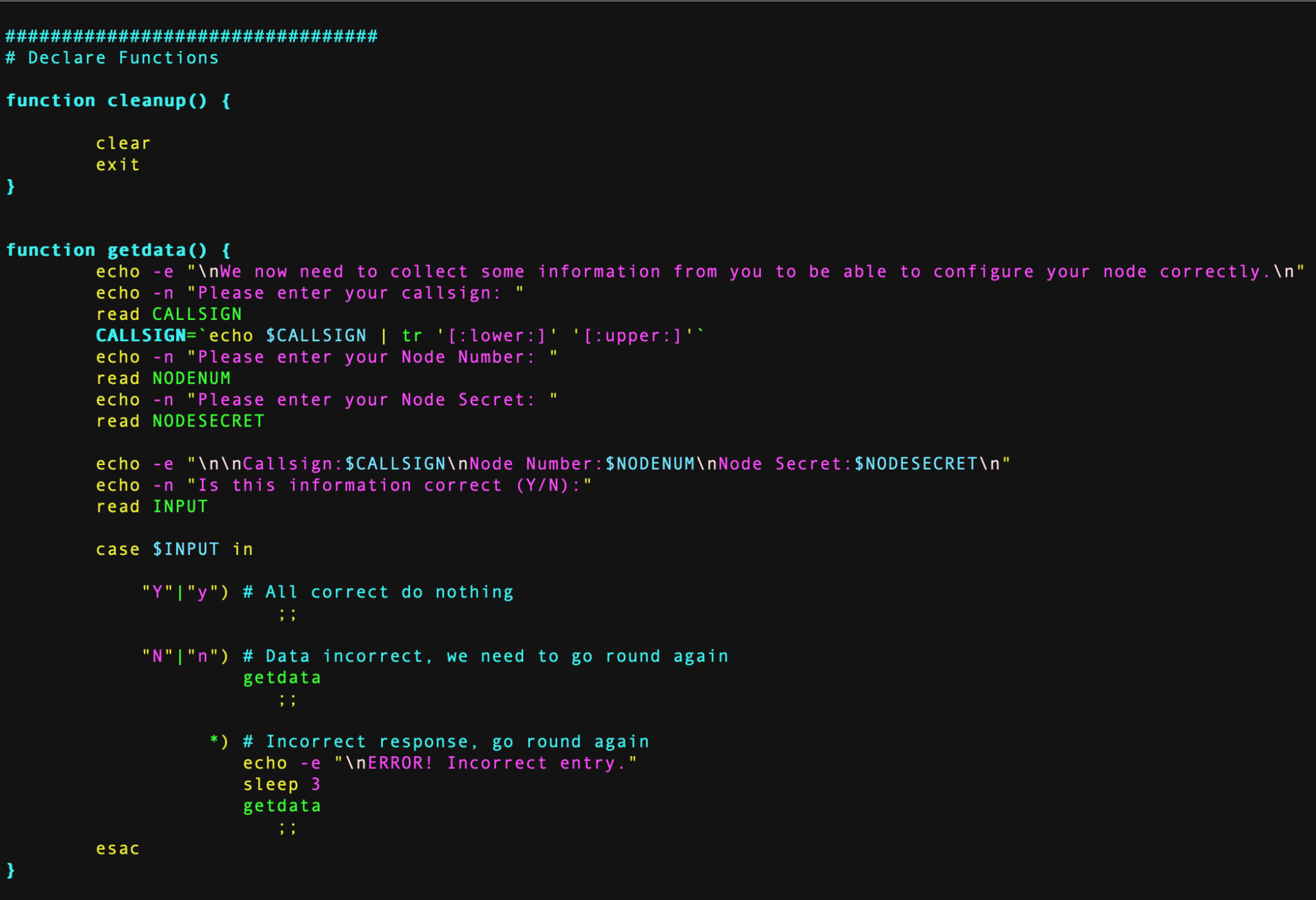
Finally, if you want to change the nodes that each button connects/disconnects you will need to edit the set flow var’s function at the top of the main flow. All you will need to do is replace the existing node numbers taking care not to alter the rest of the code in any way otherwise, it could stop the flow from working.
Once you’ve edited the node numbers, double click on the associated button node and change its Label to show the new node name.
Once your changes are complete, Deploy the flow again and your changes will be live.
This is version 1 of the ASL Dashboard, I already have ideas for version 2 that will also have the ability to enter a node number into a field and connect to it without the need to program it into a button.
More soon …
 Release Date: September 7, 2024 Here is a summary of the news trending This Week...
Release Date: September 7, 2024 Here is a summary of the news trending This Week...
 Read more at ARRL.org
Read more at ARRL.org Via AMSAT: ANS-245 AMSAT News Service Weekly Bulletins
Add Node Names to SHARI AllstarLink Announcements
This is more of an aide memoire for myself more than anything but, may be useful to anyone who is using a SHARI powered AllStarLink node.
Out the box the SHARI build as documented here and here uses node numbers in announcements when connecting/disconnecting. The information in this article will change this so that the announcements use the node callsigns instead of node numbers.
As user repeater, login to the RaspberryPi that the SHARI is connected too via SSH and run the following commands:
1: Edit /usr/sbin/write-node-callsigns and change SRCDIR to point to /var/www/html/allmon2
# 28/08/24 - M0AWS - Changed path to point to allmon2
##SRCDIR=/var/www/html/allmon
SRCDIR=/var/www/html/allmon22: Copy the astb.txt file into the necessary directory:
sudo cp /var/hdd.log/asterisk/astdb.txt /var/www/html/allmon23: Run the programme to create the sound files. (This will run for some time on a RaspberryPi 3b)
sudo /usr/sbin/write-node-callsigns4: Once all the sounds files have been created, connect to another node and you should now get node name announcements instead of node numbers ….
More soon …
Automated RaspberryPi/SHARI Node Build
After writing my article on how to build an AllStarLink node using a RaspberryPi 3b and SHARI radio device I was asked by a few people if I could possibly automate the process to make it easier for those who aren’t Linux command line junkies like me.
Over the last couple of days in-between doing other things I’ve been writing and testing a BASH shell script that will completely configure a fully working AllStarLink node.
To use the script you must already have your RaspberryPi (preferably a Pi 3b) connected to your LAN with full internet access using the Raspbian based version of the AllStarLink software downloadable from here.
The specific version I use is:
asl-2.0.0-beta.6-kc1kcc-20210324-rpi-armhfI have tested the BASH script using this specific version of O/S only.
Once your RaspberryPi 3b is up and running, has full internet access and is accessible on your local LAN, using SSH login in as the user ‘repeater‘ using the password ‘allstarlink‘.
It’s important you only use this login to configure the node as this is the user the script is expecting to be run by. You must login via SSH as the SHARI device needs to be connected to the RaspberryPi 3b and you won’t be able to connect a keyboard and mouse at the same time. (If you are using two USB cables for the SHARI device then you can use a keyboard and mouse along with a monitor attached to your RaspberryPi instead of using SSH).
Once logged in as user repeater run the following wget command to download the zipped install script:
wget https://m0aws.co.uk/AllStarLink/AllStarLinkBuild.zipOnce downloaded you need to unzip the program from the zip file and make it executable using the following commands:
unzip ./AllStarLinkBuild.zip
chmod 755 ./install.shYou are now ready to build your AllStarLink node. Before you run the script make sure you have your node number and node secret to hand. These are obtained from the AllStarLink portal.
Once you’ve got all your node information you can run the script using the following command:
./install.shThe script will now take you through the full process of updating the operating system as necessary, installing all the required packages and software. It will then reboot the RaspberryPi and you will need to login and run the script a second time using the command above.
On the second run the script will install some python specific software, ask you to enter your callsign, node number and node secret and will then configure your node. The last thing it does is configure the Allmon2 and Supermon Web Admin websites. During this process it will ask you to enter a password twice for the Admin user for the two websites, make sure you make a note of this password as you will need it to login and control your node.
Once the node is configured it will be rebooted and you will then be able to connect to your node using your favourite web browser and the user admin and the password you set above.
To access the Allmon2 web-admin system use the following URL:
http://your-RaspberryPi-IP-Address/allmon2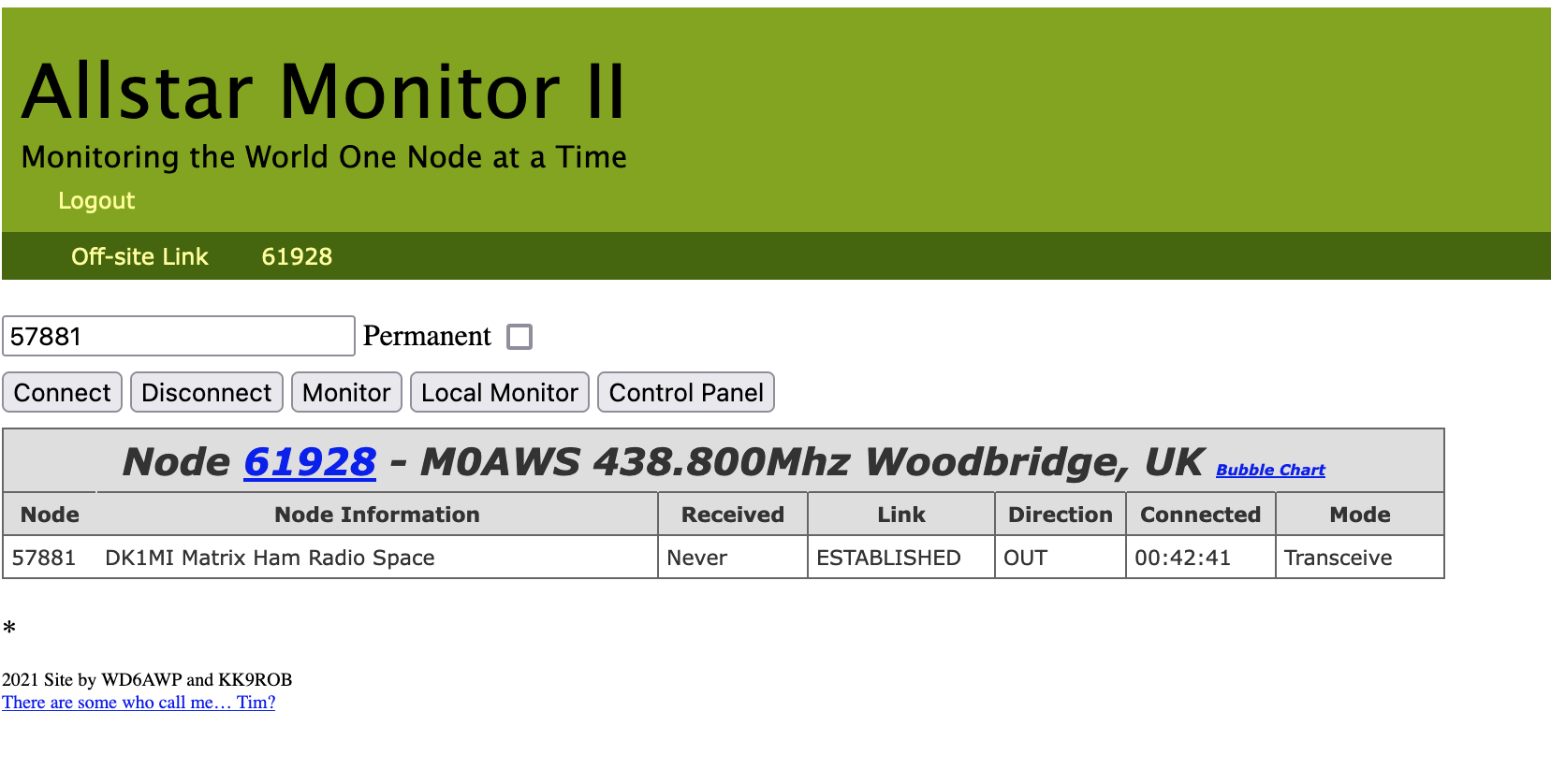
For those of you who prefer Supermon you an use the following URL:
http://your-RaspberryPi-IP-Address/supermon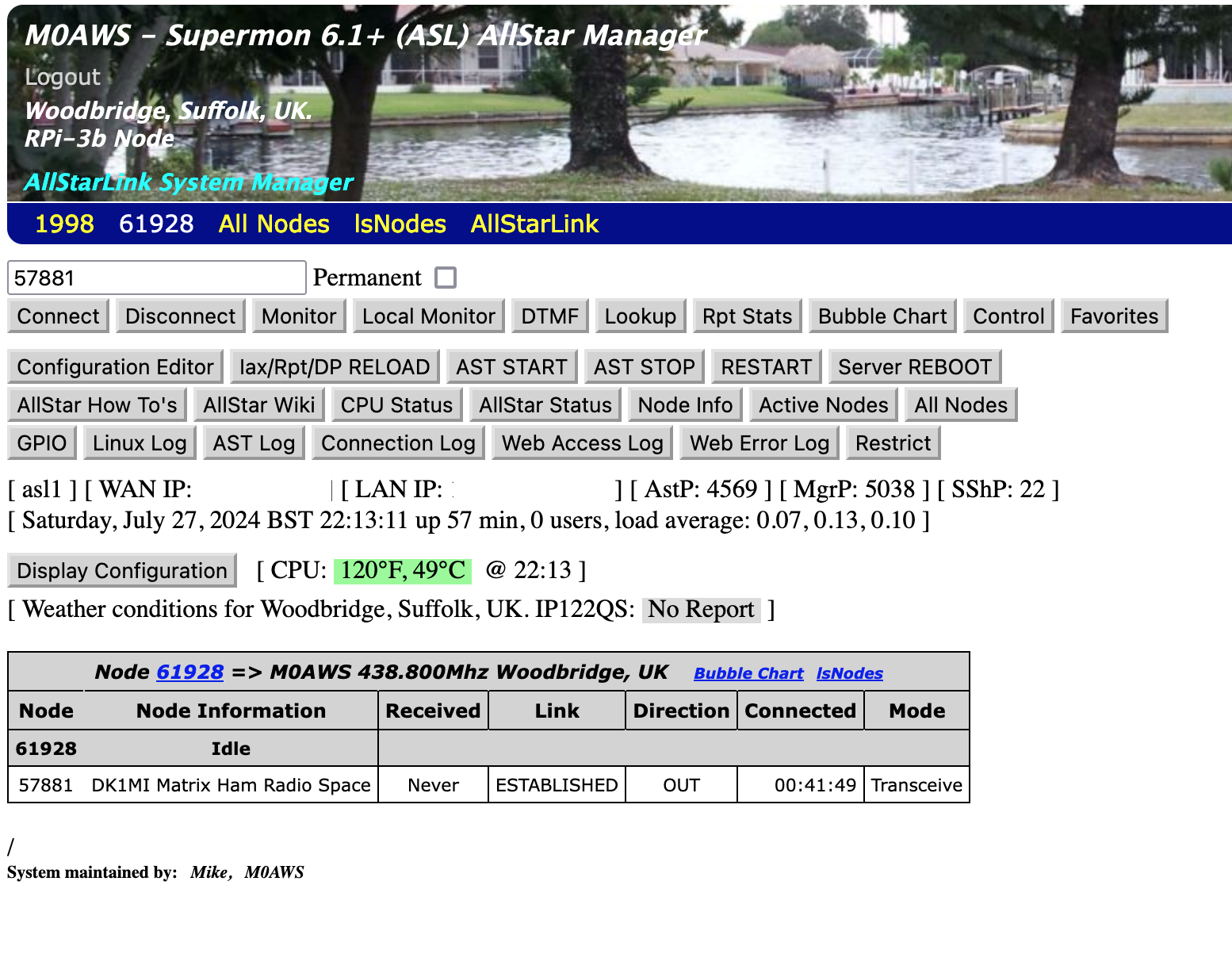
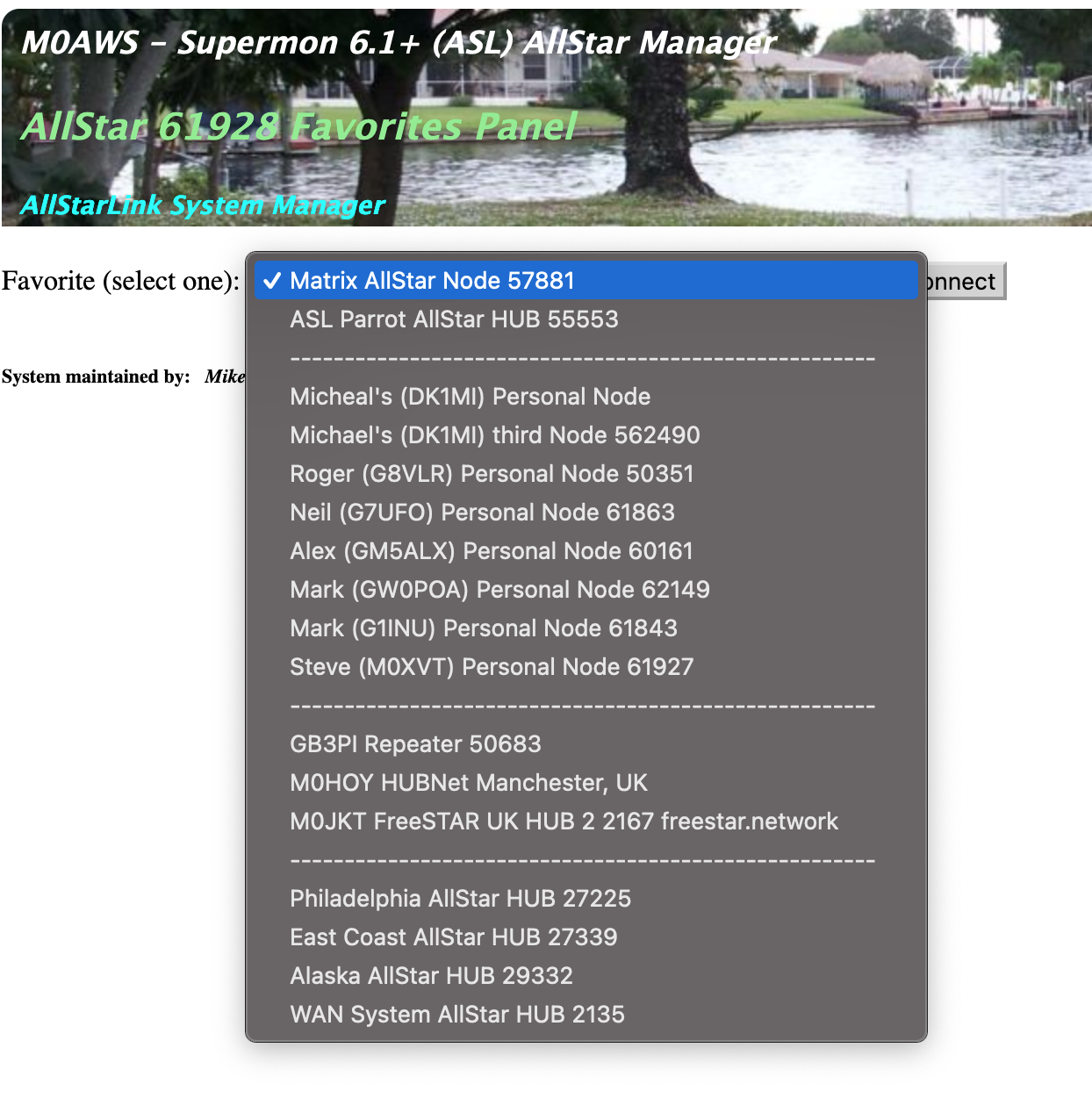
I have also pre-populated the Favorites button with a list of nodes that I use often. You can easily change these entries by editing the favorites.ini file in the /var/www/html/supermon directory as user root.
When you first login to your node via your web browser you’ll notice that it says your node isn’t in the database. You can update the database by using the following URL in your web browser:
http://your-RaspberryPi-IP-Address/allmon2/astdb.phpThis will force an update of the database and your node information should now be displayed correctly.
Hopefully this will make it much easier for the non Linux people to build an AllStarLink node using a RaspberryPi 3b and a SHARI radio device.
More soon …













Venturing into the world of AllStarLink
We’ve recently added a new room to the Matrix HAM Radio Space for Digital Voice modes as this was an area of interest that didn’t really fit into any of the other rooms.
The new Digital Voice room has attracted a lot of attention from members, with a lot of the focus being on the AllStarLink system. Michael, DK1MI built an AllStarLink node in the cloud for us all to use for Matrix Nets and so I decided I had to get in on the fun.



The Jumbospot SHARI SA818 Amateur Radio AllStarLink Radio Interface was originally designed by N8AR and implements a RaspberryPi 2/3/4 hosted AllStarLink node using a NiceRF SA818 embedded VHF/UHF radio module and sound card.
The two USB connectors on the SHARI device are position such that they plug into two of the available 4 USB ports on the RaspberryPi without the need for cables. This keeps the whole solution together in one neat package.
Before you start you will need to obtain a node number and secret (password) from the AllStarLink Portal. To get this you will need to provide proof to the AllStarLink administrators that you are a licensed Amateur Radio (HAM) operator. This is done by uploading a copy of the first page of your HAM licence to the website for the admin team to check. This can take 24hrs to be completed so make sure you get this all done before trying to build your node. You cannot build a node successfully without a node number and secret.
Of course you will also need a transceiver that can operate on the 438.800Mhz frequency or other frequency of your choice on the 2m or 70cm HAM band.
You will also need to open port 4569 on your internet router and setup port forwarding to the IP Address that you will be using on your RaspberryPi node. It’s important to use a static IP Address on your RaspberryPi.
There are quite a few different Linux based operating system (O/S) images that are available for the RaspberryPi devices that have been specifically tailored for the AllStarLink node and include all the necessary software and library packages out the box.
I decided to use the Raspbian GNU/Linux 10 (buster) based distribution as it is based on the very stable and reliable Debian Linux distro. You can download the exact version I am using from the Raspbian link above or directly from my website here.
Once downloaded you need to burn the ISO image onto a suitable SD card for your RaspberryPi. I use BalenaEtcher as it’s extremely quick and reliable at burning ISO images to SD cards.
Of course if you are a hardline Linux command line junkie you can always use dd to create the SD card.
Once you’ve got your O/S onto your SD card, slot it into your RaspberryPi making sure your SHARI device is connected to the two USB ports and then power it up. Make sure you have a good PSU for the RaspberryPi as the two devices together draw around 3A of current during the transmit cycle. (I use a 3.6A PSU from Amazon).
The default login for the Raspbian O/S is shown below. Login via SSH and configure your RaspberryPi for your local network. It’s important to use a static IP Address configured either directly on the RaspberryPi or via DHCP in your router.
Login: repeater
Passsword: allstarlink
SSH port: 22Once you have your RaspberryPi connected to your LAN you are ready to start configuring it for AllStarLink.
The first thing you need to do is login to the raspi via SSH and then become root user using sudo as shown below:
sudo su -Once you are root user, you need to add the AllStarLink repo to the sources file and update the operating system using the following command:
curl -s http://apt.allstarlink.org/repos/repo_signing.key | apt-key add
apt update --allow-releaseinfo-change
apt dist-upgradeCopy and paste each line one at a time into your terminal. Once the last command finishes, the system is up to date and can be rebooted as follows:
rebootOnce the raspi has rebooted, login again via SSH as user repeater and then become root user again.
You now need to install a couple of Python components that are required by the system to function. Use the commands below as user root:
apt-get install python3-dev python3-pip
pip3 install pyserialNext you need to change directory into the asterisk config file directory using the command shown below:
cd /etc/asteriskIn this directory you will find all the default config files that come as part of the distro. For this build we’re not going to use them and so we need to move them out of the way ready for a set of config files that have already been configured correctly.
Using the following commands create a new directory, move into that new directory and then move all the unwanted configuration files into it:
mkdir ORIGINAL-CONF-FILES
cd ./ORIGINAL-CONF-FILES
mv ../*.conf ./
ls -la
cd ../You should now be back in the /etc/asterisk directory which will now be empty apart from the custom directory which we left in place.
You now need to copy the correctly configured configuration files into the /etc/asterisk directory. Start by downloading the zip file containing the new configuration files
Once downloaded, copy the .zip file into the repeater users home directory (/home/repeater) using either scp on the Linux command line or if using Windows you can use the FileZilla Client in SFTP mode using the login details above.
Once you have the .zip file in the repeater user’s home directory you need to copy the file into the /etc/asterisk directory as user root:
cp /home/repeater/AllStarLink-Config-v3.zip /etc/asterisk/Next as user root, change directory into the /etc/asterisk directory and unzip the .zip file:
cd /etc/asterisk
unzip ./AllStarLink-Config-v3.zipOnce the file is unzipped you will have a directory called AllStarLink-Config in the /etc/asterisk directory. You now need to cd into the directory, copy all the files out of it into the /etc/asterisk directory leaving a copy in the AllStarLink-Config directory for future reference:
cd /etc/asterisk/AllStarLink-Config
cp ./* /etc/asterisk
cd /etc/asteriskYou now need to move a couple of files into the repeater users home directory using the following commands:
mv ./SA818-running.py /home/repeater
mv ./gpio /home/repeaterOnce the files have been moved you need to set the correct ownership and privileges on the files using the following commands:
chown -R root:root /etc/asterisk/*.conf
chown repeater:repeater /home/repeater/gpio
chown repeater:repeater /home/repeater/SA818-running.py
chmod 755 /home/repeater/gpio
chmod 755 /home/repeater/SA818-running.pyThe gpio BASH script and configuration details were supplied by Mark, G1INU in the Digital Voice room on the Matrix. It adds the COS light functionality to the setup. The COS light will now light every time the SA818 hears RF on the input.
The next thing you need to do is configure the SA818 radio device in the SHARI. The script I used was originally from https://wiki.fm-funknetz.de/doku.php?id=fm-funknetz:technik:shari-sa818 all I’ve done is change the entries to switch off CTCSS and change the frequency to 438.800Mhz. Configuring the SA818 is done by running the SA818-running.py Python programme that you moved into the repeater user home directory. Making sure you are still user root, run the following commands:
cd /home/repeater
./SA818-running.pyAt this point your SHARI SA818 device will be configured to operate on 438.800Mhz and CTCSS will be disabled.
If you want to change the frequency or enable and set a CTCSS tone to access the node you will need to edit the Python programme using your favourite text editor and change the entries accordingly. Once changed rerun the program as shown above and your SHARI will be reconfigured to your new settings.
Next you need to move the allmon.ini.php file into the correct directory so that it enables access to the Allstar Monitor web page on the device so that you can manage connecting/disconnecting nodes. Use the following commands as user root to achieve this:
cd /etc/asterisk
mv ./allmon.ini.php /var/www/html/allmon2/
chown root:root /var/www/html/allmon2/allmon.ini.php
chmod 644 /var/www/html/allmon2/allmon.ini.phpThe allmon.ini.php file needs to have your node name entered into it to work correctly. As user root, change directory and edit the file using your favourite editor.
cd /var/www/html/allmon2Using your text editor, search for the line starting [XXXXX] and change the XXXXX to your node number. Save the change and exit the file.
At this point you are almost complete, all that is left to do is add your node number and node secret into the appropriate configuration files in the /etc/asterisk directory.
Since I am a Linux command line junkie I use vi to edit all the configuration files on the command line as user root, but you can use any editor of your choice.
cd /etc/asteriskStart with the extensions.conf file. Search for the line starting with NODE = and delete the XXXXX entry and insert your node number. Save the file and exit it.
Next you need to edit the iax.conf file. This time search for the line starting with
register= and change the XXXXX for your node number and the YYYYYYYYYYYY for your node secret. Be careful not to accidentally delete any other characters in the lines otherwise it will corrupt the configuration file.
In the same file search for the two lines that start with secret = and change the YYYYYYYYYYYY for your node secret. Once you have changed both of the secret entries, save and exit the file.
The final file to edit is the rpt.conf file. Once again open the file using your favourite editor and search for the line starting with XXXXX = radio@127.0.0.1:4569/XXXXX, change the XXXXX entries for your node number making sure not to delete any other characters next to the XXXXX entries.
Further down in the same file there is a line that starts with [XXXXX], once again change the XXXXX for your node number making sure to keep the square brackets at each end of the node number as you edit it.
Finally move down to the very bottom of the file and find the two lines that start with /home/repeater/gpio, once again change the XXXXX entries for your node number.
The final thing to change in the rpt.conf file is to replace my callsign with your own callsign so that the node identifies itself correctly. Scroll through the file until you find the two lines shown below, delete M0AWS and add your own callsign instead making sure you keep all the spaces between words as shown below.
idrecording = |i DE M0AWS
idtalkover = |i DE M0AWSOnce this is done, save and exit the file. At this point your node should be fully configured and will only require a reboot to get it working.
As user root, reboot your raspi using the reboot command.
rebootOnce your raspi comes back online, login using SSH as user repeater and then become root user using the sudo command detailed above.
You now need to create the admin user password for the Allstar Monitor web page on the device. This is done using the following commands as user root:
cd /var/www/html/allmon2
htpasswd -c .htpasswd adminYou will be asked to enter a password twice for the admin user. Make sure you make a note of this user/password as you will need it to login to the web page.
Finally check that the controlpanel.ini.php file is in the /var/www/html/allmon2 directory:
ls -la /var/www/html/allmon2/controlpanel.ini.phpIf the file isn’t shown in the directory, enter the following commands to create the file in the correct place as user root and then exit the SSH session:
cd /var/www/html/allmon2
cp ./controlpanel.ini.txt ./controlpanel.ini.php
cd
exitOnce this is done your configuration is complete, logout from the terminal session by entering exit once more and your SSH session will terminate.
Using your favourite web browser enter the IP Address of your raspi into the URL bar as shown below:
http://<Your-Raspi-IP>/allmon2Note: remove the <> from the URL once you have entered the required information.
Once this is done you should be presented with your node control panel as shown below.
Login using Admin and the password you set above and you are now ready to start using your node.
It’s a good idea to connect to node 55553 which is a parrot test node to check your audio levels. You can do this by entering the node into the field at the top left and pressing the connect button.
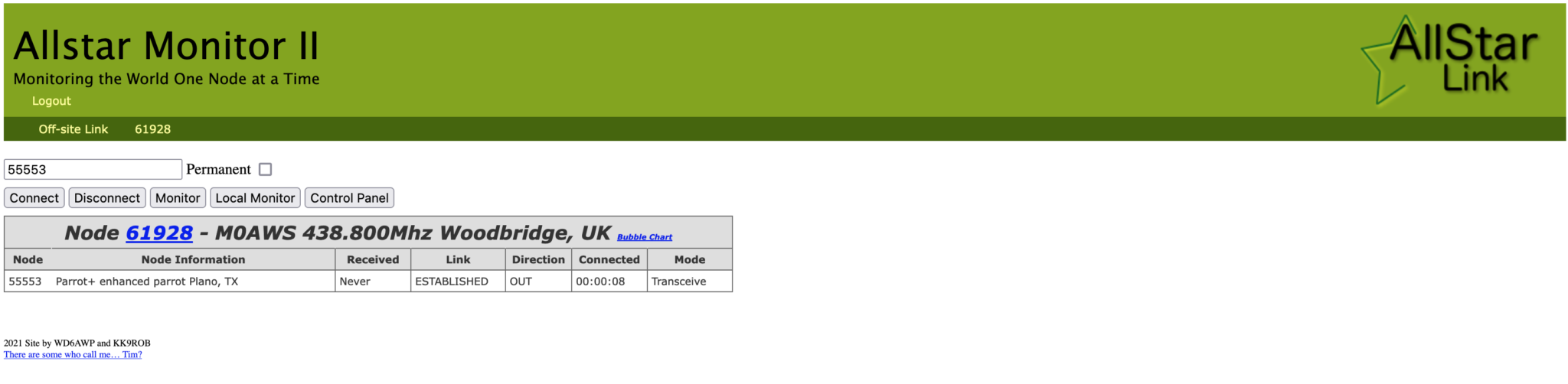
Once connected, tune your radio to 438.800Mhz FM and transmit a test message using your callsign and test123, or something similar. The parrot will then play your recording back to you so that you can hear how you sound. It will also comment on your audio level as to whether it is OK or not.
You are now connected to AllStarLink network and have the world at your finger tips. Below is a small list of nodes in the UK, Australia and America to get you started chatting with other HAMs via your node.
57881 Matrix HAM Radio Space AllStarLink Node (Hosted by Dk1MI)
55553 ASL Parrot for testing
41522 M0HOY HUBNet Manchester, UK
60349 VK6CIA 439.275 Perth, Western Australia
51077 VK6SEG South West Hub B Albany WA
2167 M0JKT FreeSTAR UK HUB 2 freestar.network
53573 NWAG NW AllStar Group Lancashire, UK
27339 East Coast Hub Wilmington NC USA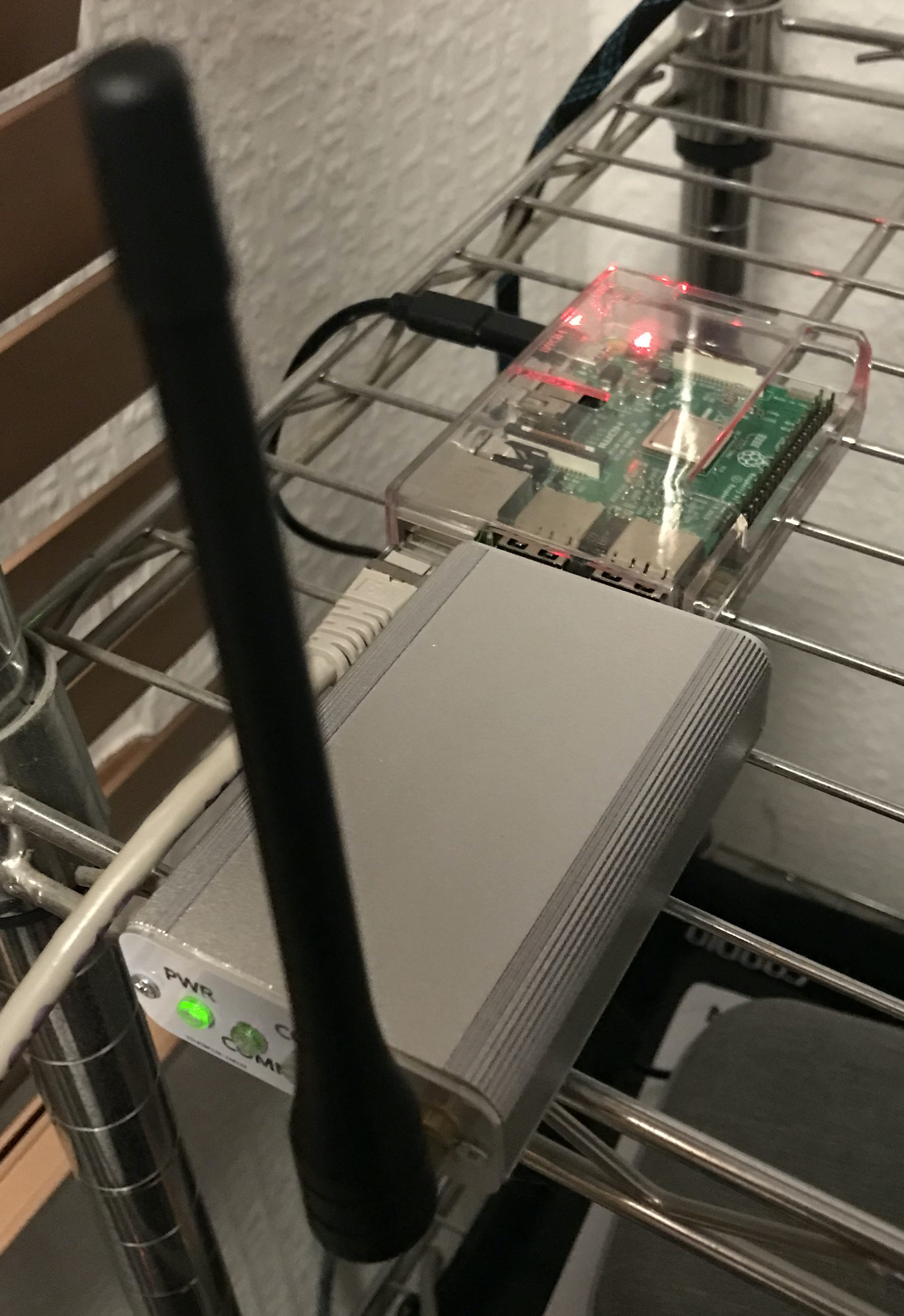
Thanks to Michael, DK1MI for building and hosting the Matrix HAM Radio Space AllStarLink Node (57881) and getting us all started in the world of AllStarLink!
We hope to be having regular Matrix Net’s on the node soon for all Matrix members and visitors. We’ll organise days/times via the Digital Voice room.
More soon …









Wertheim National Wildlife Refuge K-0481

Introduction:
Since the weather is still very cool here on Long Island, I decided to try out my new “Mount-It! Car Desk” for this activation. Werthiem is my first attempt at using the table for any deployment.
While I do like the convenience of the new table and the fact that it keeps me out of the weather, like anything else in the world, is not perfect. But for reading, using a laptop, eating or playing Amateur Radio, it’s another good, inexpensive tool for general use.
Benefits of the Mount-It! Car Desk:

- A car desk is a great way to activate a park from the back seat of your car during nasty weather.
- The car desk is sturdy enough to hold my KX3, 3Ah 12vdc LIfePO4 battery, UTC clock and notepad sized logbook.
- I plan to use the car desk for other tasks like using my laptop and reading while killing time between doctor appointments.
- The car desk can be used with the steering wheel or attached to the headrest of the front seat for back seat operations.
- The unit is lightweight so you can easily take it with you wherever you go. It’s also easy to set up and take down, which makes it that much more convenient in a pinch.
- The car desk is a stable surface to work on. The angle of the desk can be altered for use with a QRP rig, laptop or angled for reading.
Check out the Mount-It! Car Desk here
Watch The Mount-It Car Desk Video here
Takeaways:

My first impression is that the car tray is not rock solid. When using the onboard KX3 with the QRPGUYS paddle kit (shown in photo), there is a very slight up and down movement to the tray, mostly due my heavy hand leaning on it.
Initially I was a bit flustered trying to work my first few contacts with the slight motion of the tray but after a short time I was able to compensate for the movement. Of course using an alternative plug-in paddle would have resolved that problem.
The car desk easily handled the weight of the KX3, Bioenno battery and my heavy handedness. I’d say that the car desk could easily handle the weight of any current QRP rig around.
FAQ:
What can I use a car desk for?
You can use a car desk for a variety of tasks, including eating, working on a laptop, or reading.
How do I use a car desk?
To use a car desk, simply attach it to your steering wheel or front seat headrest and place your belongings on the surface. You can then adjust the height and tilt of the desk to find the most comfortable position for you.
Is a car desk safe to use?
Yes, a car desk is safe to use as long as you follow the instructions. Make sure to attach the desk securely to your steering wheel or front seat headrest.
Where can I buy a car desk?
You can buy a car desk online or at most automotive stores.
How much does a car desk cost?
The price of a car desk varies depending on the brand and model. However, most car desks cost between $20 and $50.
Do I need any special tools to use a car desk?
No, you don’t need any special tools to use or install a car desk. However, some desks may come with a set of instructions that include helpful tips for installation.
Conclusion:

Using the car desk definitely helped with my activation. Rather than leaning over to the left when I had to place the KX3 on the folded left rear seat, it was a pleasure to sit forward while working and logging my contacts.
With a roof mounted Hamstick and 10 watts CW, it’s always a surprise to find out just how far a signal with travel. During this activation I worked as far west as Oregon (K7GT) and to the east it was Poland (SP9RXP).
Check out the Mount-It! Car Desk here

QSO365 #3 is complete – Ten QSOs per day in 2021
I’ll kick off with the statistics for the whole of 2021 and then go into the details. QSOs made: 8,265Unique QSOs made: 5,776Average QSOs per day: 22.6Days missed: 0 <- This is the most important statistic, it means that QSO365 #3 was a success. DXCC entities worked: 168New DXCC entities worked: 1Total DXCC worked and […]
The post QSO365 #3 is complete – Ten QSOs per day in 2021 first appeared on QSO365.tag:blogger.com,1999:blog-3306097083362758983.post-331108867283206159
Using Elecraft KX3/K3 KY Codes to Allow N1MM & RTTY-FSK
A Step-by-step Guide (assuming no previous experience)
Anthony Luscre- K8ZT
Introduction
This guide has been written assuming you have had little or no experience with using KX3 USB Interface or N1MM operations. For those with previous knowledge fill free to skip ahead to needed configuration and sample Macros. There maybe other settings that work, but these worked for me.This setup should also work with K3 or K3S
Why?
- I wanted to use the KX3’s excellent FSK (not AFSK) and KX3’s RTTY to Text Decoding
- I did not want to use a Signalink or other digi interface or use my computer’s sound card
- I was only interested in using RTTY for casual operation in a contest that required serial numbers and wanted to be able easily send reply with incrementing serial numbers
- A bonus is ability to also use this setup for SSB or CW (If you are interested in non-macro driven, direct keying CW see appendix)
What you need-
- ACC-1 USB Interface Cable that ships with KX3 (the same one you use for Firmware updates)
- Computer running Windows XP, 7, 8 or 10 (“N1MM Logger+ incorporates the latest multi-threading technology, and will take full advantage of multi-core CPUs.. A single-core 1.6 GHz processor is probably the minimum required, but the CPU requirements depend quite heavily on which program options, modes, etc. are selected, so this may not be adequate depending on how you use the program. The program itself does not require a large amount of memory, but the more memory you have, the more smoothly Windows multitasking works.”)
Setup-
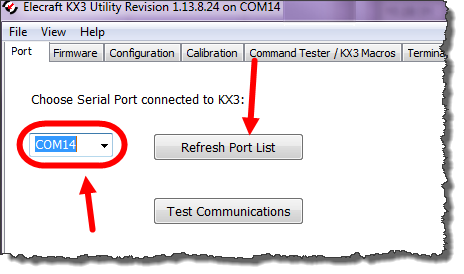
- Install KX3 Utility Software
- Plug USB cable into radio & computer
- Turn on KX3
- Determine USB Port # being used by KX3
- Start KX3 Utility Software and click “Test Communications” button
- Note the resulting port # (this will vary depending on other device connected to your computer.)
- Exit (File...Exit) KX3 Utility Software
- Install N1MM Software
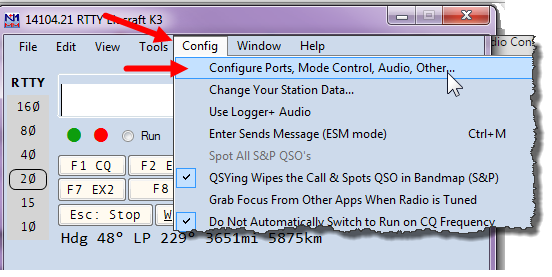
- Configure N1MM Software
- On top menu choose “Configure” then “Configure Ports, Mode Control….”
- “Configure Ports, Mode Control….” dialog box will open
- You will need to use two tabs at the top
- “Hardware”
- “Digital Modes
- Configure Hardware Tab


- Choose the Port # that you noted above (with KX3 Utility Software). If the port is not listed, change one of the ports to the number you need
- Choose KX3 as the Radio
- Check “CW/Other” box
- Click “Set” to configure connection settings as show in screenshot D
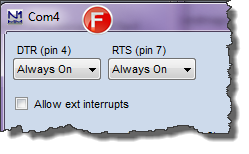
- Check “Digi” box for any port number that is not being used by KX3 or other USB devices connected to your computer. (If not sure choose clicking on the drop down box will show available ports).
- Click “Set” on the port you have chosen for “Digi” and set as in the screenshot F
- Configure “Digital Modes” tab
- Choose “Digital Interface TU Type”. Then chose “Soundcard”.
- Click OK to close
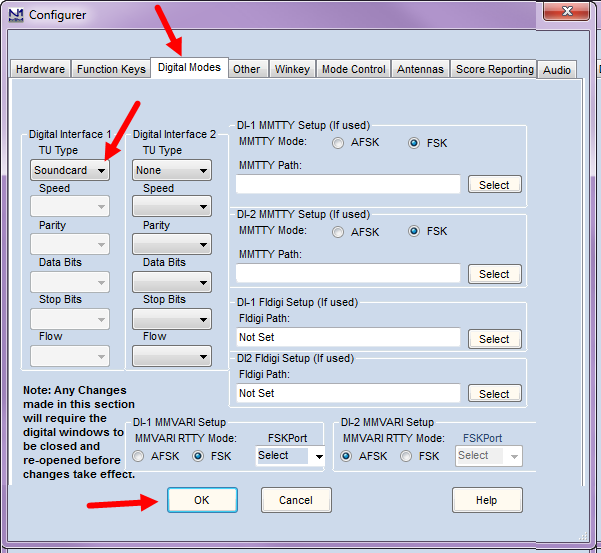
- Close “Configure” then “Configure Ports, Mode Control….” dialog box
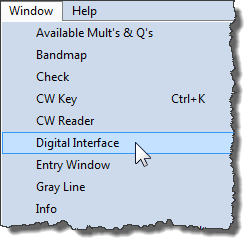
- Click on “Windows” Top Menu bar then choose “Digital Interface” a pair of windows should open.
- On the “Soundcard” dialog box, choose “Interface” menu.
- Select “MMTTY” (It should not, but if it does say you have to install “MMTTY”, it is free software- http://hamsoft.ca/pages/mmtty.php).
- You can minimize them and/or move them out of the way as they will not function in this configuration.
- You will be using the KX3 Decoded Text Display
- Load N1MM Macros
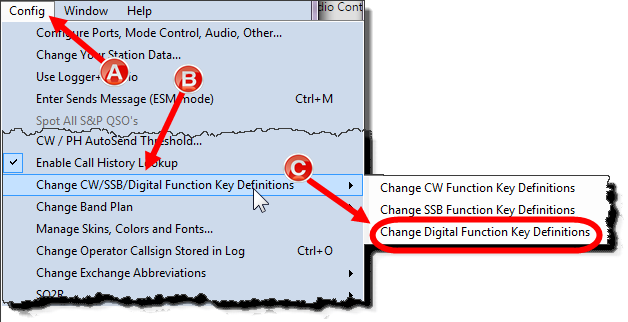
- On the top menu choose “Configure” then “Configure Ports, Mode Control….”
- Click “Change CW/SSB/Digital Key Definitions”
- Click “Change Digital Function Key…”
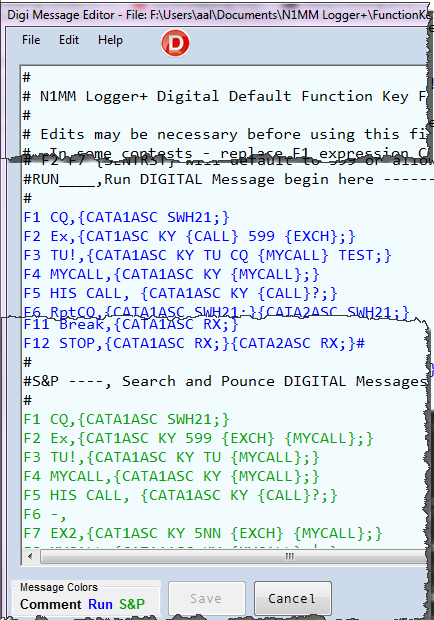
- Paste the sample “Run” & “Search & Pounce” messages (see sample list below) into box.
- Edit to match your preferences.
- Save, with a new name (KX3-Macros-CW) or anything to distinguish it from N1MM default messages file.
- Please note: macro in F12 is designed to stop transmit if does not terminate on its own.
Sample set of Macros for RTTY Contesting
#Simple RTTY K3/KX3 EXAMPLE
#The space between the KY and the first character in the actual message
#is required by the K3/KX3 command syntax, as is the semicolon at the end
#of the message.
##REM ———-, Special instructions begin at end-of-file —————————–
#
#
#RUN____,Run DIGITAL Message begin here —————————–
#
F1 CQ,{CATA1ASC SWH21;}
F2 Ex,{CAT1ASC KY {CALL} 599 {EXCH};}
F3 TU!,{CATA1ASC KY TU CQ {MYCALL} TEST;}
F4 MYCALL,{CATA1ASC KY {MYCALL};}
F5 HIS CALL, {CATA1ASC KY {CALL}?;}
F6 RptCQ,{CATA1ASC SWH21;}{CATA2ASC SWH21;}
F7 EX2,{CAT1ASC KY 5NN {EXCH} {MYCALL};}
F8 AGN?,{CAT1ASC KY AGN?;}
F9 Nr?, {CAT1ASC KY NR?;}
F10 SEC?, {CAT1ASC KY SEC?;}
F11 Wipe,{WIPE}
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
#S&P ———-, Search and Pounce DIGITAL Messages begin here —————————–
#
F1 CQ,{CATA1ASC SWH21;}
F2 Ex,{CAT1ASC KY 599 {EXCH} {MYCALL};}
F3 TU!,{CATA1ASC KY TU {MYCALL};}
F4 MYCALL,{CATA1ASC KY {MYCALL};}
F5 HIS CALL, {CATA1ASC KY {CALL}?;}
F6 -,
F7 EX2,{CAT1ASC KY 5NN {EXCH} {MYCALL};}
F8 AGN?,{CAT1ASC KY AGN?;}
F9 Nr?, {CAT1ASC KY NR?;}
F10 SEC?, {CAT1ASC KY SEC?;}
F11 Wipe,{WIPE}
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
#REM ———-, Special instructions begin at end-of-file —————————
Sample set of Macros for CW Contesting
#RUN____,Run CW Message begin here —————————–
#
F1 CQ,{CATA1ASC SWH21;}
F2 Ex,{CAT1ASC KY {CALL} 5NN {EXCH};}
F3 TU!,{CATA1ASC KY TU CQ {MYCALL} TEST;}
F4 MYCALL,{CATA1ASC KY {MYCALL};}
F5 HIS CALL, {CATA1ASC KY {CALL}?;}
F6 RptCQ,{CATA1ASC SWH21;}{CATA2ASC SWH21;}
F7 EX2,{CAT1ASC KY 5NN {EXCH} {MYCALL};}
F8 AGN?,{CAT1ASC KY AGN?;}
F9 Nr?, {CAT1ASC KY NR?;}
F10 SEC?, {CAT1ASC KY SEC?;}
F11 Wipe,{WIPE}
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
#S&P ———-, Search and Pounce CW Messages begin here —————————–
#
F1 CQ,{CATA1ASC SWH21;}
F2 Ex,{CAT1ASC KY 5NN {EXCH} {MYCALL};}
F3 TU!,{CATA1ASC KY TU {MYCALL};}
F4 MYCALL,{CATA1ASC KY {MYCALL};}
F5 HIS CALL, {CATA1ASC KY {CALL}?;}
F6 -,
F7 EX2,{CAT1ASC KY 5NN {EXCH} {MYCALL};}
F8 AGN?,{CAT1ASC KY AGN?;}
F9 Nr?, {CAT1ASC KY NR?;}
F10 SEC?, {CAT1ASC KY SEC?;}
F11 Wipe,{WIPE}
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
#REM ———-, Special instructions begin at end-of-file —————————–
#On K3/KX3 use straight Key to end tranmission at anytime
#
Sample set of Macros for SSB Contesting
#RUN ———-, Run SSB Messages begin here —————————–
#
F1 pulls message from Memories, test to verify assignments in your radio
F1 CQ,{CATA1ASC SWT21;}{CATA2ASC SWT21;}
F2 Exch,{CATA1ASC SWT31;}{CATA2ASC SWT31;}
F3 Thanks!,{CATA1ASC SWT35;}{CATA2ASC SWT35;}
F4 {MYCALL},{CATA1ASC SWT39;}{CATA2ASC SWT39;}
F5 -,
F6 RptCQ,{CATA1ASC SWH21;}{CATA2ASC SWH21;}
F7 REC,{CATA1ASC SWT37;}{CATA2ASC SWT37;}
F8 -,
F9 -,
F10 -,
F11 -,
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
#S&P ———-, Search and Pounce SSB Messages begin here —————————–
#
F1 CQ,{CATA1ASC SWT21;}{CATA2ASC SWT21;}
F2 TU QRZ,{CATA1ASC SWT31;}{CATA2ASC SWT31;}
F3 NA1DX,{CATA1ASC SWT35;}{CATA2ASC SWT35;}
F4 {MYCALL},{CATA1ASC SWT39;}{CATA2ASC SWT39;}
F5 -,
F6 RptCQ,{CATA1ASC SWH21;}{CATA2ASC SWH21;}
F7 REC,{CATA1ASC SWT37;}{CATA2ASC SWT37;}
F8 -,
F9 -,
F10 -,
F11 -,
F12 STOP,{CATA1ASC RX;}{CATA2ASC RX;}
#
